
【Eachine RedDevil 105mm】のレビューも終盤にとなってきました。
BetaFlightの設定をすれば飛ばせる状態になりますので、サクッと設定しちゃいましょう!そして何としても今日飛ばしたいw
ポイントも含めて記載して行きますねー!
[box class="box28" title="合わせて読みたい"]
-

【Toothpick】Eachine RedDevil 105mm 2-3S FPV Racing Drone Whoop登場!
「Eachine RedDevil 105mm」がリストアップしました! 「Toothpick」シリーズの第1弾としてレビューしている【Happymodel Sailfly-X】ですが、一度飛ばしてし ...

-
【Eachine RedDevil 105mm】レビュー!機体が届いたので開封していきます!
だいぶ出遅れてしまいましたが【Eachine RedDevil 105mm】が届きましたのでレビューしたいと思います♪ 今回はPNP(レシーバー無し)をチョイスしたんですが、既に何処にレシーバーを設置 ...

-
【Eachine RedDevil 105mm】レビュー!解体&セットアップ!
【Eachine RedDevil 105mm】のレビュークを進めていますが、今回は機体のチェックからセットアップまでをまとめてご紹介したいと思います。 moccaはPNP(レシーバー無し)を購入しま ...

-
【Eachine RedDevil 105mm】レビュー!BetaFlight設定をして飛ばす準備を♪
【Eachine RedDevil 105mm】のレビューも終盤にとなってきました。 BetaFlightの設定をすれば飛ばせる状態になりますので、サクッと設定しちゃいましょう!そして何としても今日飛 ...
-
【Eachine RedDevil 105mm】テストフライト!やっぱり軽くて良く飛びます♪
【Toothpick】Eachine RedDevilのテストフライトをして来ました♪ 最近まで梅雨だったので、機体が届いてからだいぶ時間がたっちゃいましたが、飛ばしてみるとやっぱり軽い事もあって本当 ...

[/box]
【Eachine RedDevil 105mm】BetaFlight設定をして飛ばす準備!

Eachine RedDevil 105mm 2-3S FPV Racing Drone Whoop
Eachine RedDevil 105mm BetaFlightの設定
Eachine RedDevil 105mmのファームウェアは4.0.0ですが、なんちゃって4.0.0なので利用するのは「BetaFlight confitgurator 10.4」となります。
ポートタブ
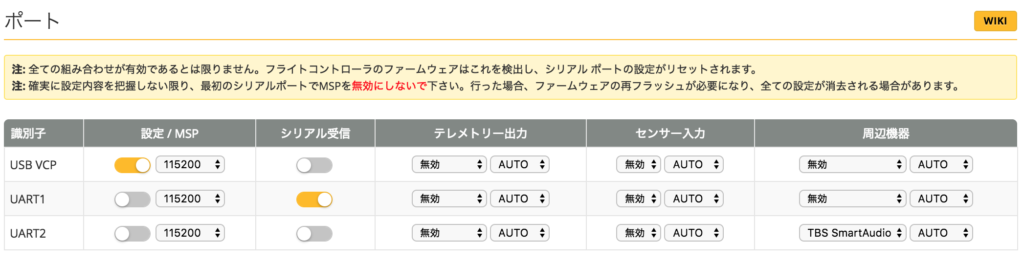
初期設定のままで問題なさそうですね。このまま行きましょう。
基本設定タブ
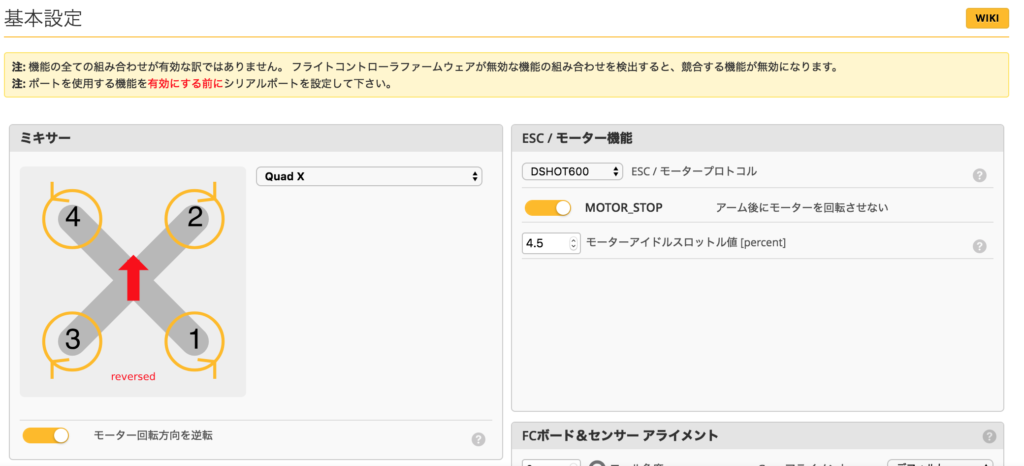
ミキサーのモーターの逆回転のみ設定します。
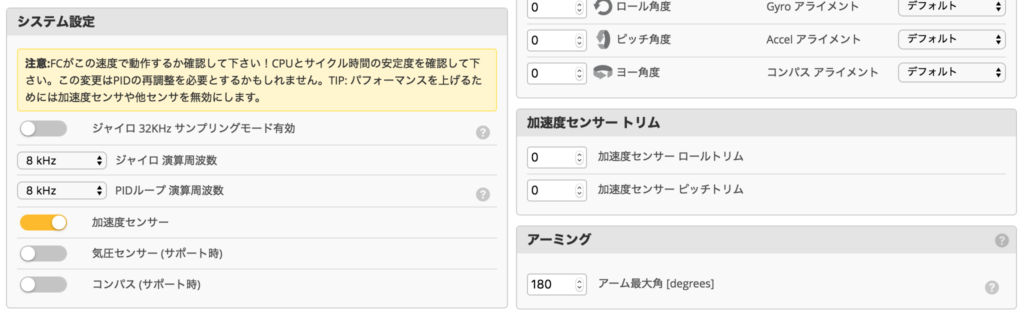
システム設定やアーミングなどはこのままで大丈夫ですね。
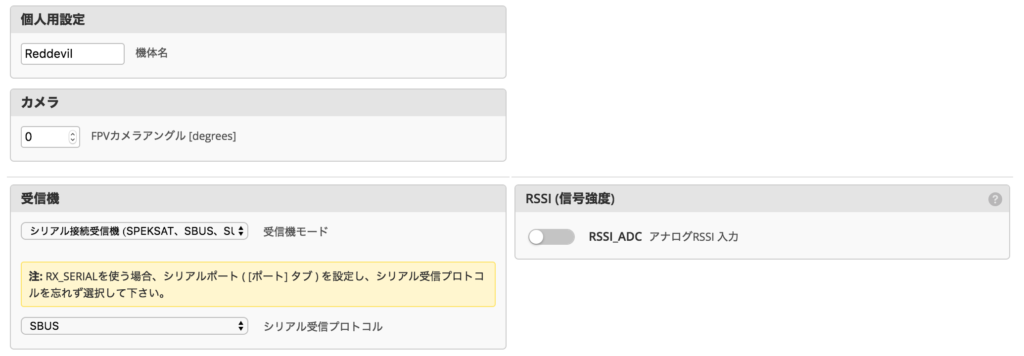
受信機設定もOKです。
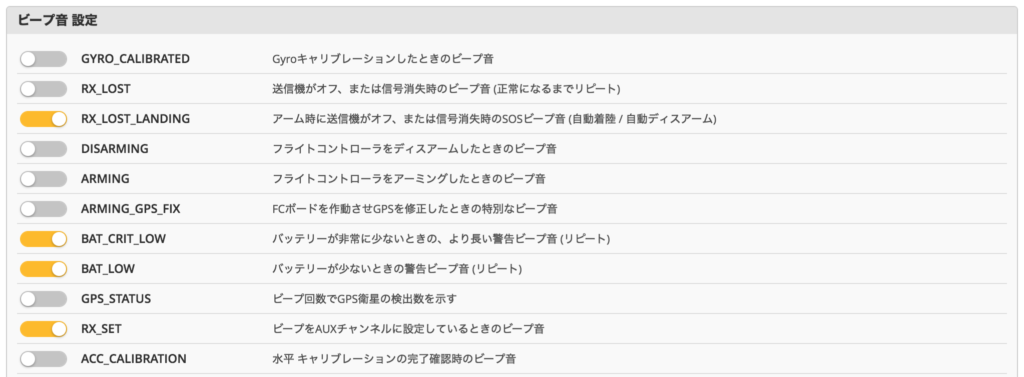
ビープ音設定は必要なものだけに変更しました。
最近は上記の設定にする事が多いですね。バッテリーが少ない時のビープ音はオン方が便利だと感じています。
電源・バッテリータブ

デフォルト設定だとバッテリーの警告電圧と最小電圧が低いので少しあげています。警告は3.4vくらいで十分です。あまり低い電圧まで利用するとセルバランスも崩れてしまうので3.4vくらいでフライトを終えた方が良いと思います。
この辺りはセル数が増えるほどあんまり低い電圧まで利用しない様にしてます。

3S300mahHvバッテリーは「4Pcs URUAV 11.4V 300mAh 40C/80C 3S HV 4.35V Lipo Battery XT30 Plug」が安くてオススメです!
PIDタブ


まずはデフォルト設定からです。moccaは今までの経験から少し設定値を変更します。

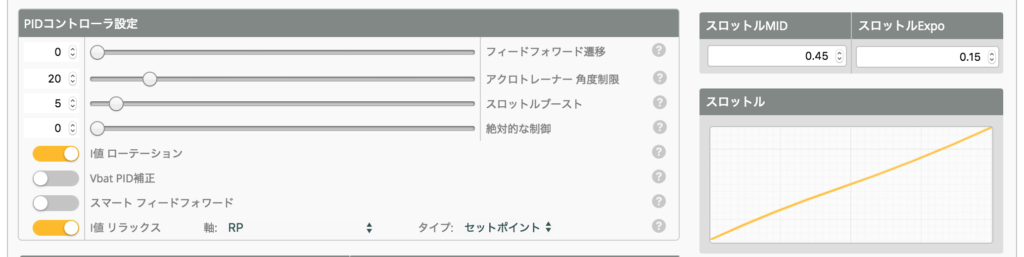
こちらが変更後ですが、デフォルトの設定のままでも良かったかなぁと思いました。
後はスロットルの調整をして75%に変更します。
BetaFlightのCLIタブで以下を入力してかっ飛びすぎる仕様を少しマイルドにw
set throttle_limit_type=scale
set throttle_limit_percent=75
save
受信機タブ
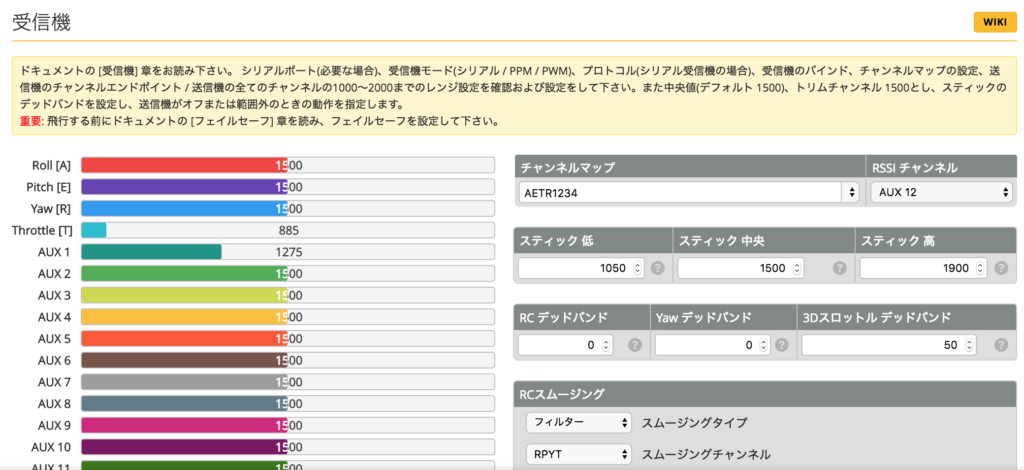
チャンネルマップ「AETR1234」&RSSI「AUX12」チャンネルのみを変更しました。
モードタブ
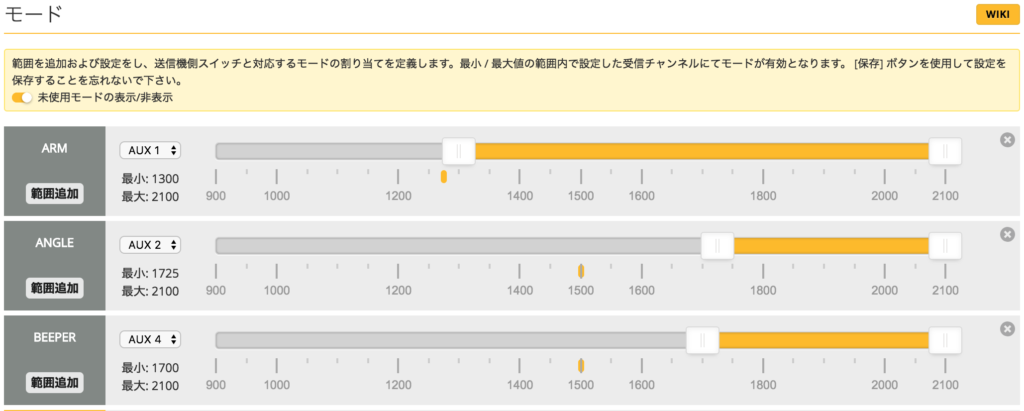

モードタブはいつもの設定で。皆さんのお好みで設定して貰えればOKです。
OSDタブ
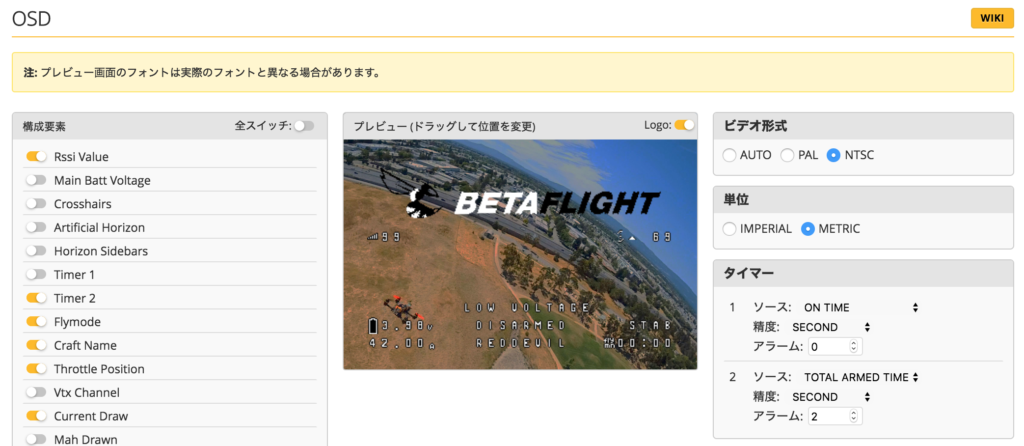
OSDもいつもの設定に変更しました。
BlHeliでモーターをリバース設定へ変更!
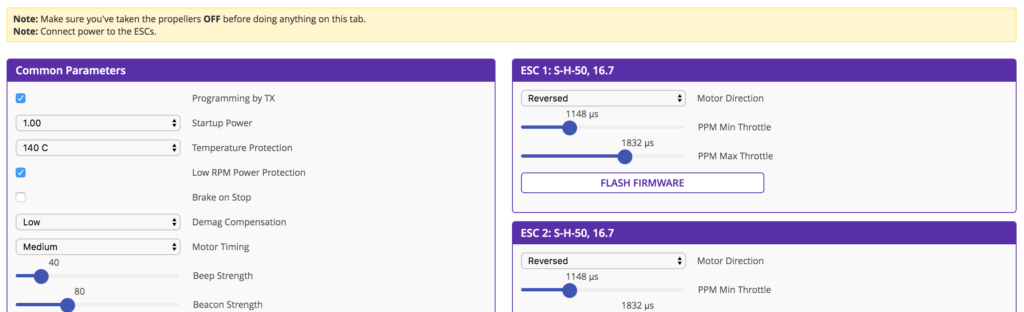
モーターリバース設定をしましょう。
まとめ
これでフライト設定完了しましたのでテストフライトに行ってきます(๑˃̵ᴗ˂̵)b
[box class="box28" title="合わせて読みたい"]
これから複数セルの充電器を購入する方にオススメです。
-
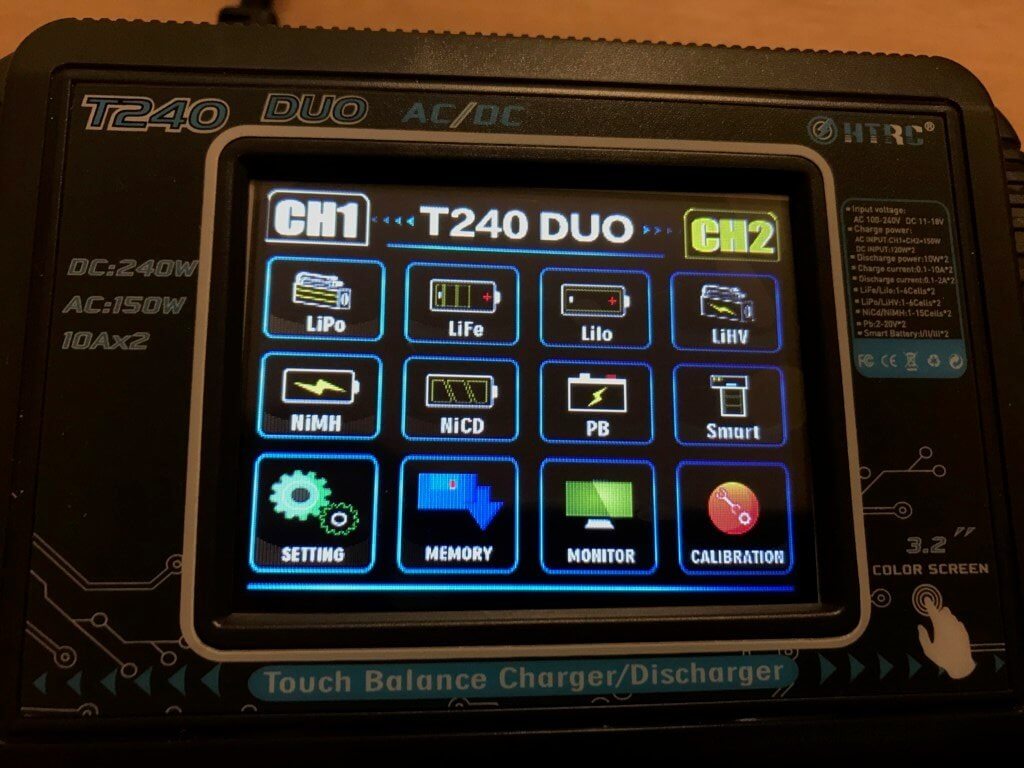
コスパ最強と言われる2S〜6S対応の充電器「HTRC T240 DUO Touch Screen Dual Channel Battery Balance Charger Discharger」をレビュー!
drone4さんのブログでも紹介のあったコスパ最強と言われる2〜6Sのバッテリーを2個口充電できる「HTRC T240 DUO AC 150W DC 240W 10A Touch Screen Dua ...
Ev200Dも少し値段が下がってきましたね♪
-
EachineFPVゴーグル「EV200D」がオススメな理由!何方にでも間違いが起こり難い!
当ブログで一押しのEachineFPVゴーグル「EV200D」ですが、オススメするにも理由があります。 勿論ですがメリットだけではなくデメリットもありますが、何方にでも間違いが起こり難いゴーグルとなっ ...

[/box]