レースドローンやマイクロドローン(Tinywhoop)などで、PID(PID設定、PID制御)を変更してしっかり設定すれば機体が見違える様に飛ぶ様になるという話を良く聞くと思います。(ビシ、バシって言われる物ですね。)
現在はBetaFlight4.1.0がリリースされていますので、始めたばかりの方でも比較簡単にPIDの設定を変更する事が可能となりましたが、でもその前に「RC Rate & Super Rate & RC Expo」の設定する事を強くオススメします。
何故かというとPIDは機体毎に個別の設定が必要ですが、「RC Rate & Super Rate & RC Expo」辺りのレートと呼ばれている設定は機体の回転などを決める値となりますので、全ての機体で共通して設定する事でバラツキを無くす事が可能となります。
尚、こちらの記事は先人の有名なお二人の記事を読み、それを私なりに理解しながら試した結果の内容となります。
[memo title="MEMO"]
本記事ではBetaFlight 3.5.xで説明をしていますが、バージョンが違ってもレートの概念は同じです。
PIDに関する記事はこちらをどうぞ♪
-

BetaFlight4.1.0を利用して見よう!「4.1 Tuning Notes」マニュアルの一部日本語化!
前回の記事では「BetaFlight4.1.0」の導入方法について記載しましたが、今回は主だった点について日本語化していきたいと思います。 と言ってもGoogle先生に頼りっぱなしですが、英語というだ ...

[/memo]
レート「RcRate & SuperRate & RcExpo」とは何か?
BetaFlightのデフォルト設定ではレート「RC Rate & Super Rate & RC Expo」が基本的には同じ値となっています。実はこの値は非常に高くプロポのスティックを少し動かしただけでドローンが動いてしまう設定になっています。
ではRateとは何か?というと
- プロポのスティックを動かした時にドローンの機体がどれくらい俊敏に動くのかを決定する値
と理解しています。
moccaはスムースなフライトを重視して飛ばしていますが、無駄な舵を無くす事を意識しています。要するには切りすぎて戻すという動作を極力無くすという事です。
それでは各パラメーターの要素を説明して行きたいと思います。
Rc Rateとは何か?
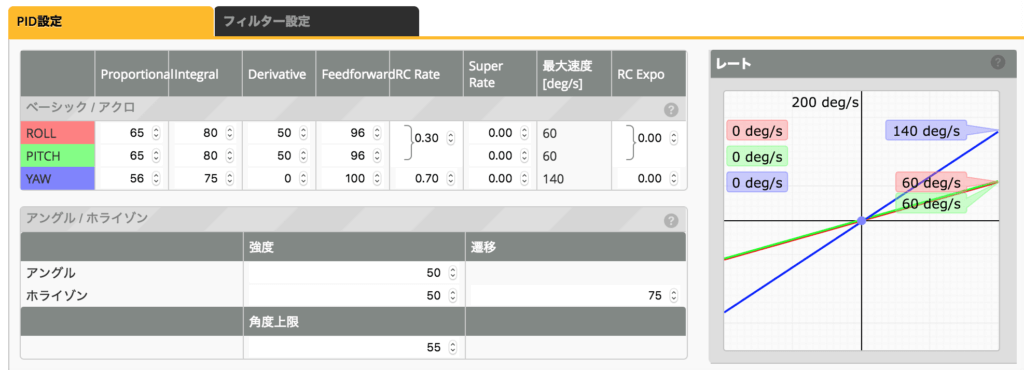
RC Rateはプロポのスティックのレスポンスを直線的に決定する値となります。上記の図はその変化が解り易くなる様にSuper RateとRC Expoを0にしてあります。つまりは…。
- 高くすると全体的に敏感になる
- 低くすると全体的に鈍感になる
BetaFlightのデフォルト設定値は「1.0」である事が多いですが、この値は初心者の方には非常に高い値となっています。レーサーの方などは1.2辺りに設定する方もいるかと思いますが、個人的には0.7辺りで設定する事をオススメします。
値を0.1程度変更するだけでもかなりの効果を体感する事が出来ますので、少しづつ変更して好みの値を決定しましょう。
Super Rateとは何か?
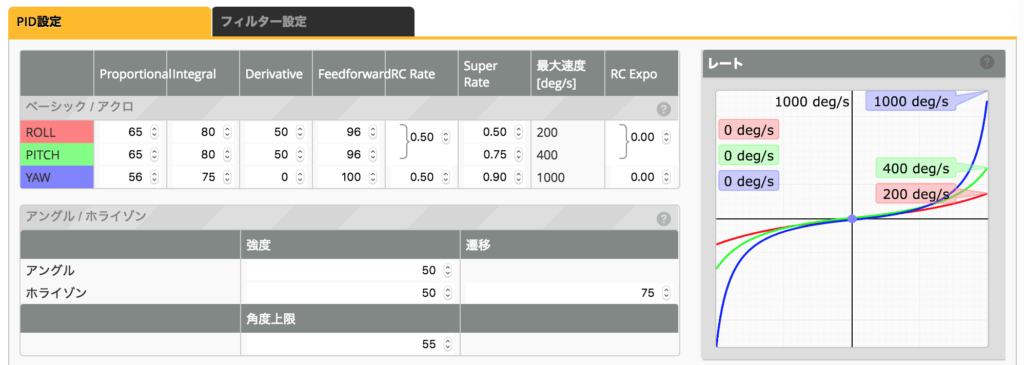
Super Rateとはプロポのスティック端っこのレスポンスを決定する値となります。上記の図は先ほどを同じ様に解り易くする為にRC Rateの値を固定し、Super Rateで3つの値を設定してあります。つまりは…。
- 高くするとスティック端っこ付近が敏感になる
- 低くするとスティック端っこ付近が鈍感になる
最近販売されている機体のBetaFlightの設定値は少しカスタマイズされている場合がありますが、基本的には0.7-0.8辺りの値となっている事が多いと思っています。
個人的には少し高めの設定で良いと感じていますので、0.75 - 0.85辺りの値とする場合が多いです。
Rc Expoとは何か?
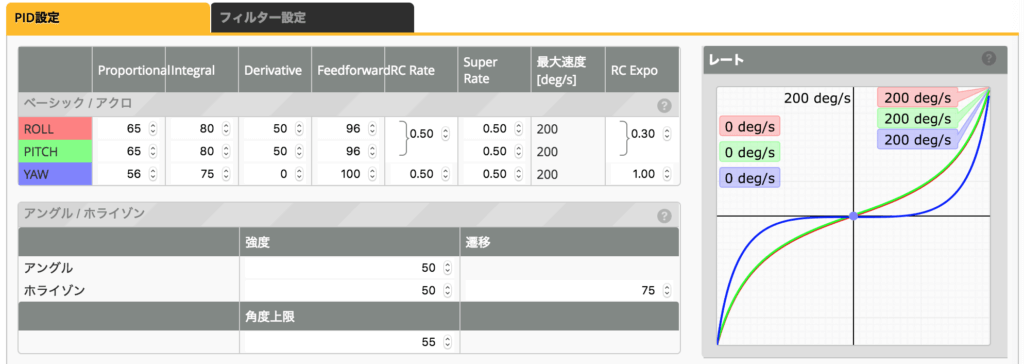
プロポのスティック中央付近でのレスポンスを決定する値となり、Super Rateとは真逆の設定をすると理解すれば良いでしょう。上記の図は先程までの2つの値を固定しRc Expoの値のみ変化させています。
RC Expoを高くすると中央付近での操作性が鈍くなると思っていますし、実際に値を変更するとその様に体感する事が可能です。つまりは…。
- 高くするとスティック中央付近が鈍感になる
- 低くするとスティック中央付近が敏感になる
こちらは利用しているプロポやスティックの持ち方で大きく変わる値で、サムナーの方は値が高め、ピンチャーの方は値が低めの事が多い様です。
ピンチャー(ツマミ持ち)の方はスティックの動きの精度が高い為に値を低くしても問題なく、サムナーの方はスティックの振りが大きくなりがちなので中央付近を鈍感に設定する事で無駄をなくすというイメージだと思っています。
ちなみに私はサムナーで最近では0.15-0.25の辺りで設定する事が多いです。
deg/sとは何か?

deg/sとは1秒間に機体がどれくらい回転するのかを示した値です。
例えば上記の紫色はYAWの回転を示す値となり、上記の図での認識方法は「636/360」で理解する事が可能です。
つまり1秒間に1.766...回転するという事となります。初期設定では1000辺りとなっている場合が多く、1秒間に3回転近くと非常に素早い動きをするという事になり制御が難しくなります。
どの様に値を決めていくのか?機体ジャンル別考察
ドローンに慣れるまでは全て同じ値を設定するのが望ましいと思いますが、基本的には以下で決めていく事が良いと感じています。
例えば65-75mmの軽量フープタイプ。75mm-85mmの重量級フープタイプ。ToothPick、そして5インチなどです。
レートが変化してしまうと体が覚えていた回転する早さが変わってしまうので、同じ様に操作しても同じ結果が得られないという事になってしまいますので、ある程度のジャンルで決めた値を使い続け調整して気に入った値が見つかったら同じジャンルの機体に同様の設定を入れる。という具合です。
具体的な値の設定例は?
1つのジャンルの解と言いますか、その指標は多くの方に共有されていてブラシレス65mmフープでは「Project MokingBird V3」がその代表例です。
moccaのブログでもご紹介したUR65/US65に設定した値となります。これで何故、この2つの機体をオススメしたのかの理解を深めて貰えたらと思っていますが…。
Tinywhoopを飛ばしている多くの方はこちらの値を元にカスタマイズしているという風に理解しています。
-
【これから始めるマイクロドローン⑦】moccaと一緒に設定を進めて行こう!Project MokingBirdV3設定!
「【これから始めるマイクロドローン】moccaと一緒に設定を進めて行こう!「Eachine US65」を再購入!」の第7回目の記事になります。 今回は前回の第6回目の記事内でご紹介しましたフライト動画 ...
65mm Brushless whoop Acro Modeの設定値と補足
例えば以下はUS65の機体のAcroモードの設定値ですが、「Project MokingBird V3」の値に追加してRC Expoを設定しています。(ドローンを始めた当初の設定値で現在はRC Rateを0.8辺りまで下げています。)
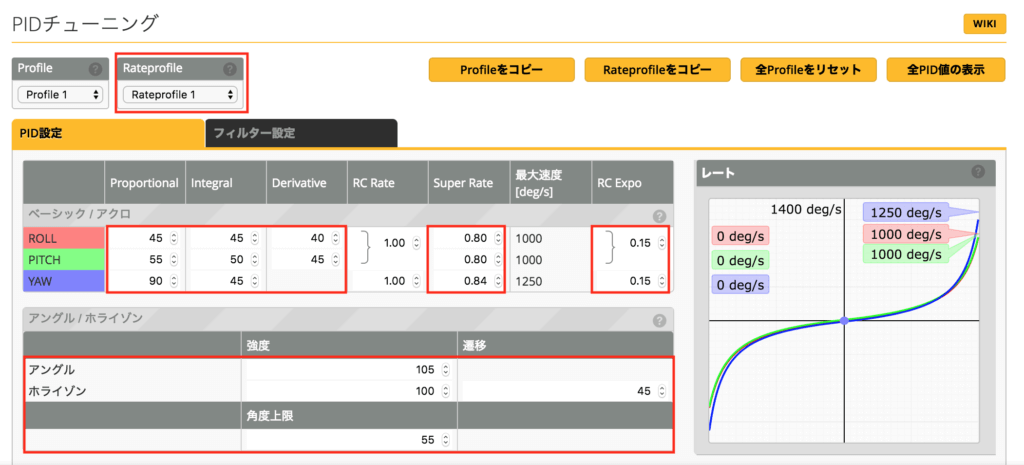
尚、Acroモードでは強度、角度上限の値は反映されません。
65mm Brushless whoop Angleの設定値と補足
続いてUS65の機体のAngle(レベル)モードの設定値ですが、こちらもAcroと同様に「Project MokingBird V3」の値に追加してRC Expoを設定しています。
Angleでは「RollやPITCH」のレートの値は反映されずに以下の図で言う「強度と角度の上限」と言う項目で機体の制御が決定されます。
強度とは機体の戻りの強さを決定する値、角度上限とは機体の傾く角度を決定する値となり、つつまりAngleモードでは「RollやPITCH」のレートを変更しても意味がないと言う事です。
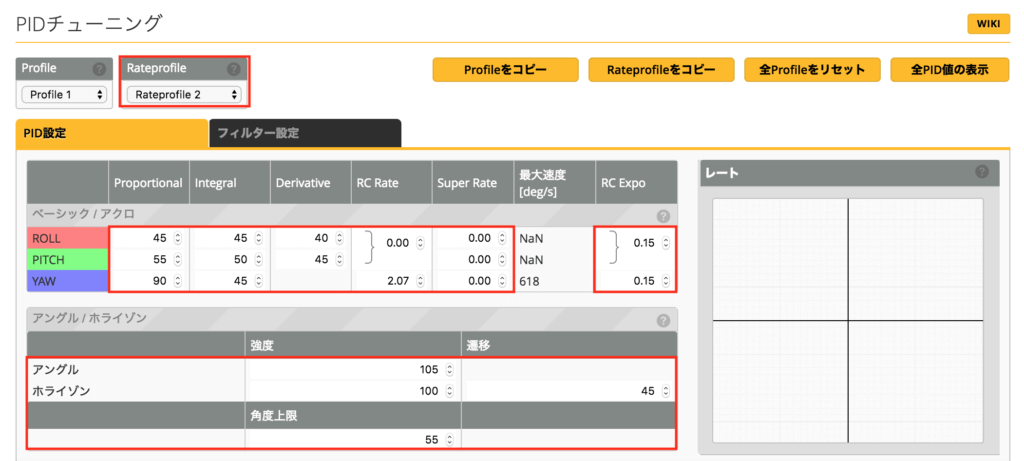
85mm HD whoop
上記は実際に私はBETAFPVのBETA85XHD(3S)で設定している値の1つで、厳密には2つの値を使い分けていますがそのうちの1つです。
尚、私はこちらの機体をAngleモードで飛ばす事はない為に強度、角度上限は未設定です。
(今はもう少し違う値になっていたりしますが、あくまでも参考例で。。)
まとめ
PIDを変えたら機体がビシ、バシとなると言うのは一種の魔法の言葉で、その前に非常に重要な設定項目があると言う事を理解しておくと良いと思います♪
最後に、こちらの記事を気に入って頂いたらシェアして貰えると励みになりますo(`ω´ )b