US65/UK65はUR65と同様に非常に優れたブラシレスドローンです。
以前、UR65でも「Project Mockingbird」についての記事を書きましたが、室内・室外問わず非常に飛ばし易い設定へとする事でよりドローンを楽しみましょう。
「Project Mockingbird」はBetaFlightでPIDなどの設定を変更する事で「inductrix FPV」と同じ様に飛ばしてしまおうという内容です。
では早速設定をして行きましょう!
[sanko href="https://docs.google.com/document/d/11h4-t42uFTP_vnDinGut6XdG6tdHH1BZmdKBRv6pM6Q/mobilebasic" title="Project Mockingbird V3" site="Project Mockingbird UR65"]
US65のProject Mockingbird設定

Eachine US65 UK65をBanggoodで見てみる
US65のProject Mockingbird V3はAgle&Acroモードでの操作
UR65の記事でもご紹介していますが「Project Mockingbird 」はAngle & Acroモードで飛ばす事を前提とした設定です。
一応、設定はしてありますので飛ばす事は可能ですが実際にHorizonモードで飛ばした事がない為にノーマル時と比較差をお伝えする事は出来ません。
Angleモードでは室内で非常に飛ばし易く、室外でも低く早く飛ばす事が出来る様になるでしょう。Acroモードでは多少まったりした味付けではありますがフリップを含めて楽しいフライトが体験出来ると思います。
しかしドローンでは当然ですが自分自身の操作が物を言います。この設定をして上達を早める事が出来ると思いますので、是非、練習してみて下さい。(と言ってもmoccaもまだ下手っぴです…。)
US65のProject Mockingbird V3設定アレンジ版
US65のProject Mockingbird設定の前置き
これからご紹介する内容は「Project Mockingbird V3」を設定する際に上手く設置が出来なかった点などを考慮した内容としています。
本家ではUS65の標準のモーター(19,000kv)を利用している場合にはプロペラは3枚のままが良いと記載がありますが、今回は4枚羽で飛ばしてみたいと思います。
プロペラは反対方向にセットします。
Betaflightは3.4.0(ダウングレード)、ECSをBLheli16.7へ。D8モード(Frysky)です。
変更前にバックアップを忘れずに実施して下さい。CLIタブで「dump all」コマンドを打ってからファイルを保存して下さい。
US65のProject Mockingbird設定のアレンジ版の準備

Project Mockingbirdの設定をする前に数点準備をしておきましょう。
勿論ですが、パーツが無ければそのままでも良い部分もありますので必要に応じて変更して行きましょう。
まずは利用するパーツ類のご紹介からです。
Beta65proフレーム

標準のフレームは折れ易く、モーターのシャフト折れにも繋がりますので、BETAFPVのBeta65proフレームがオススメです。
Eachine E010プロペラ

続いてキャノピーのカメラマウントの補強です。

カメラマウントは上側でネジ一本で止まっているのでズレてしまう事が多いです。ダイソーなどで売っているグルーガンで軽く止めておきましょう。(軽くであれば取るのも簡単です。)
ブザーを取り付けたい時はこちら。かなり狭いので初めての方はやめた方が無難です。もう壊れても良いと思えるくらいになったらハンダに挑戦しましょう。

フレームとプロペラを交換しましょう。プロペラの向きに注意して下さい。

フレームとプロペラを交換した後です。ちょっとボケちゃってますがご愛嬌で…。
US65のProject Mockingbirdの「BLHeli – Configurator」設定
「BLHeli – Configurator」はchromeのアプリがありますのでダウンロードして下さいな。
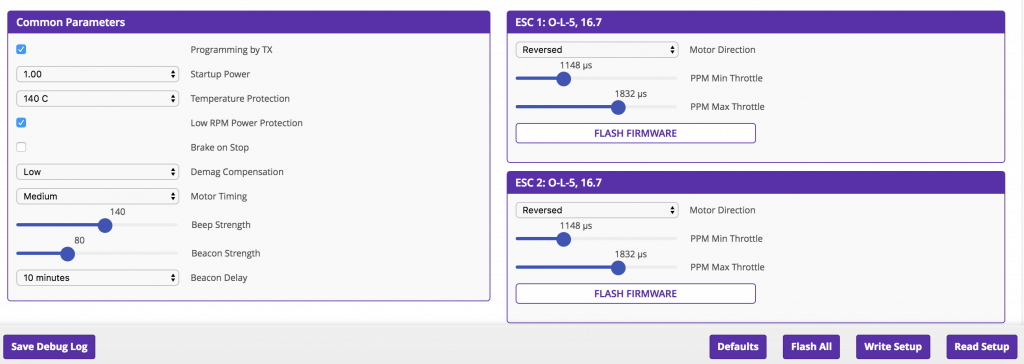
バッテリーを繋ぎMotorDirectionをReversに変更します。
ブザーの設定を行う場合には以下の設定を行って下さい。
- Beacon strength:音の大きさ → 最大
- Beacon Delay:何もしなく鳴ってから音を鳴らすまでの時間 → 1minutes
US65のProject Mockingbirdの「BetaFlight」設定
Betaflightのバージョンを3.4.0へダウングレードして下さい。
「基本設定」項目の説明です。
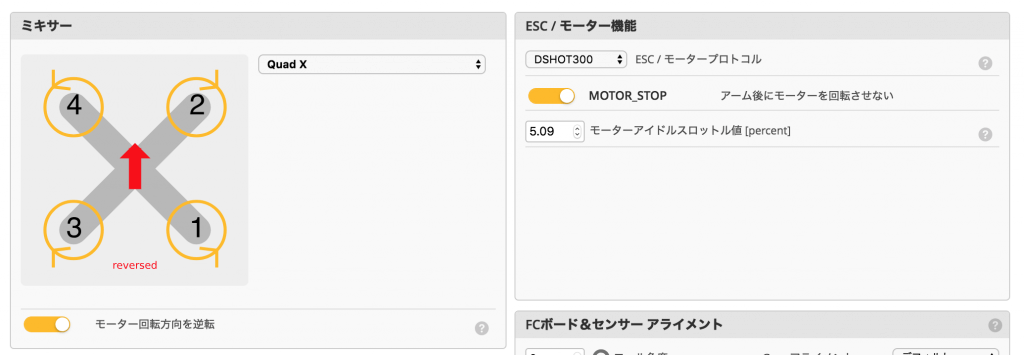
- モーター回転方向を逆転
- 「ECV/モーター」→「DSHOT300」
- 「モーターアイドルスロットル値」→「5.09」
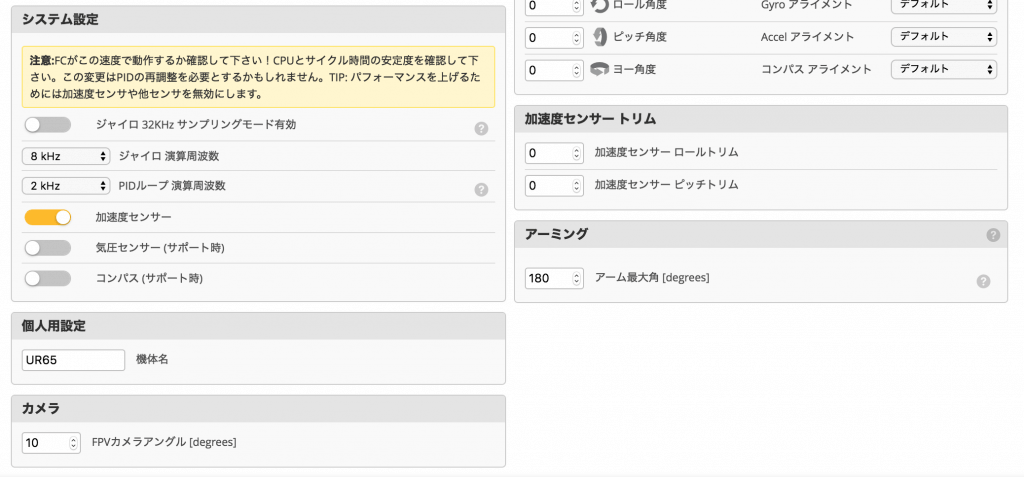
- 「PIDループ」→「2kHz」
- 「加速度センサー」→「オン」
- 「カメラアングル」→「10」
- 「アーミミング」→「180」
アーミングはタートルモード用ですので厳密には設定しなくてもOKです。
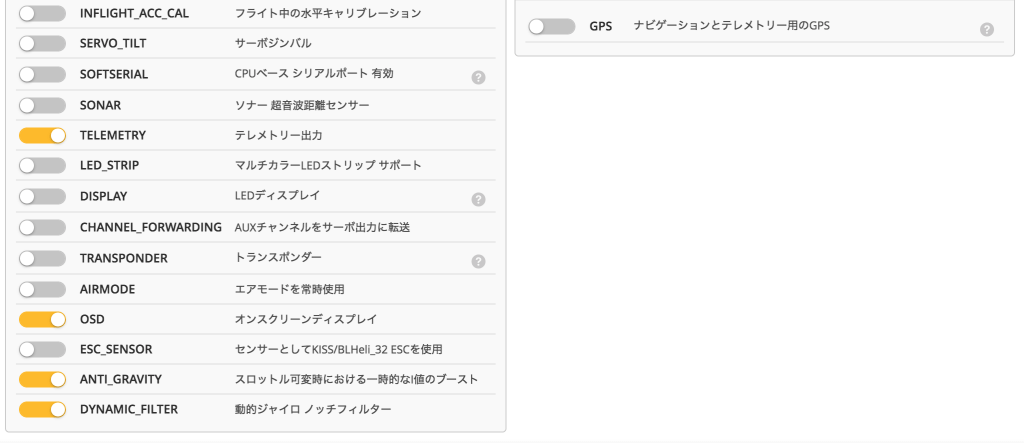
- 「ANTI GRAVITY」→「オン」
- 「DYNAMIC_FILTER」→「オン」
続いてPIDチューニングを行なっていきます。
「Acroモード」の「PIDチューニング」の説明
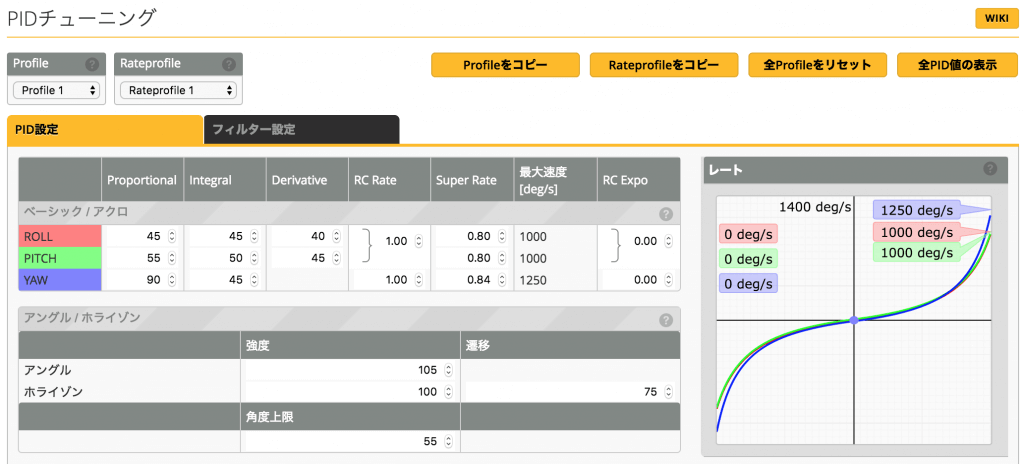
「Profile1:Rateprofile1」ではAcroモードの設定を行っています。
- 「ROLL」「RITCH」「YAW」の上記の設定を画像に通りに
- 「アングル/ホライゾン」の上記の設定値を画像通りに
プロポ側で以下の設定をしています。
T8SGの場合、「Mixer」→「THR」→「Comples」→「Mixsers3」
「Page2」→「Nux:add」→「Src:AIL」→「 Curve:ABSVAL」→「Scale:30」
「Page3」→「Nux:add」→「Src:ELE」→「 Curve:ABSVAL」→「Scale:30」
Scaleの値は適宜調整で大丈夫です。
「Angleモード」の「PIDチューニング」の説明
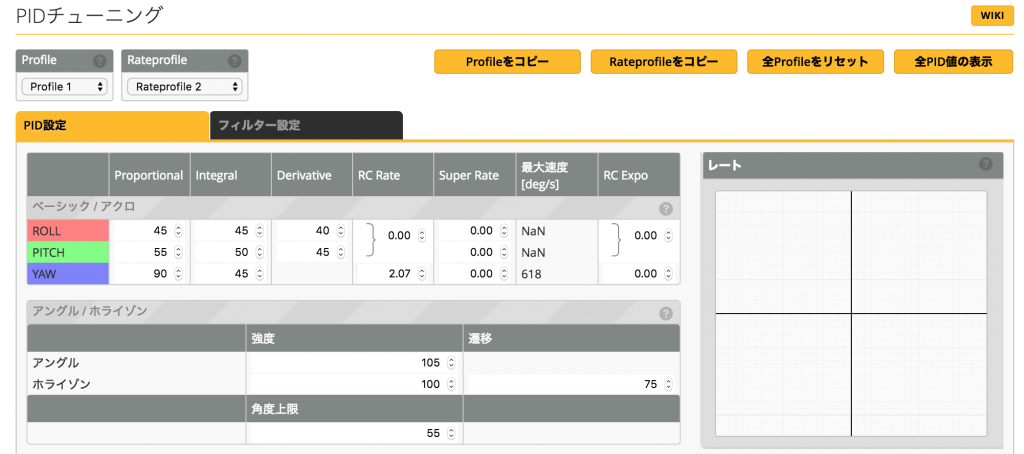
「Profile1:Rateprofile2」ではAngleモードの設定を行っていきます。
- 「ROLL」「RITCH」「YAW」の上記の設定を画像に通りに
- 「アングル/ホライゾン」の上記の設定値を画像通りに
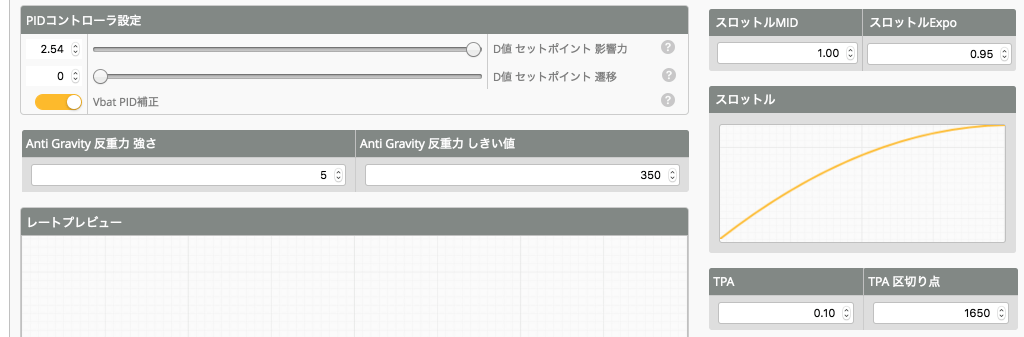
PIDコントローラ設定。
スロットルカーブは設定しないて下さい。(後で画像差し替えます。)
バッテリー設定では電圧設定を行います。
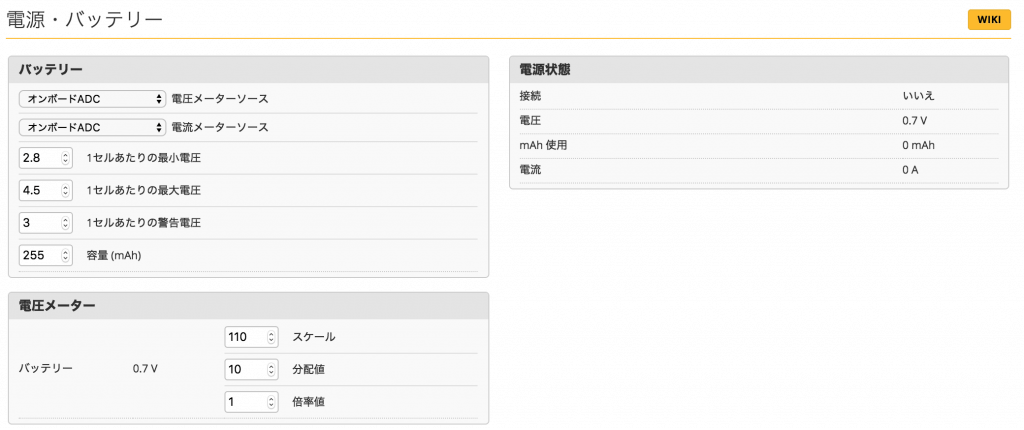
上記の設定値で全く問題ありません。LowBatteryで帰還後は3.7-3.8V付近です。
Rateprofileの選択の設定をします。
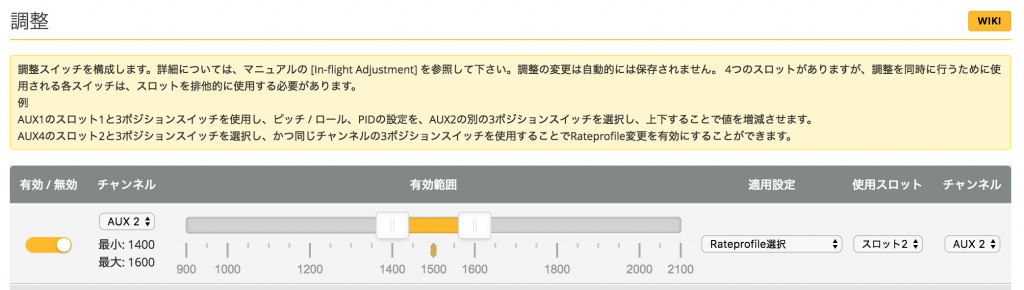
Angleモードの際にRateprofileが2となる様に設定します。
実際にアームを動かして貰うとわかりますが、1600以上にした場合にprofileが3に選択されてしまうかと思います。なのでRateprofile1にAcroモードの設定をしています。
モード設定をします。
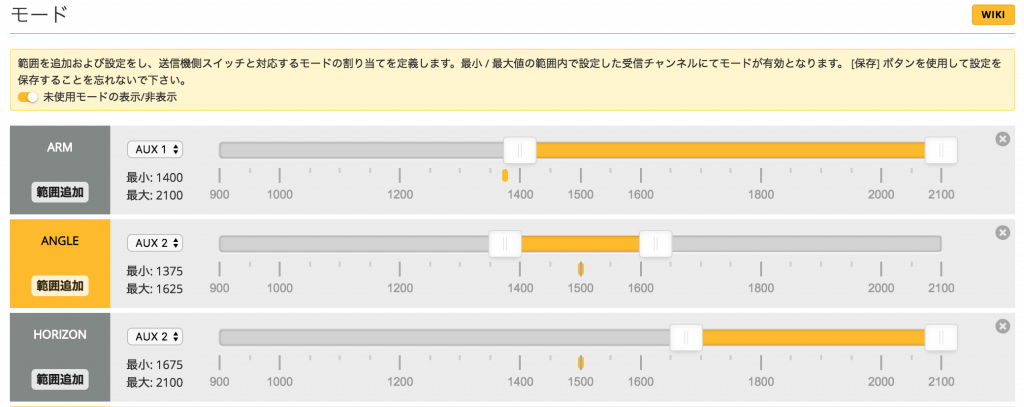
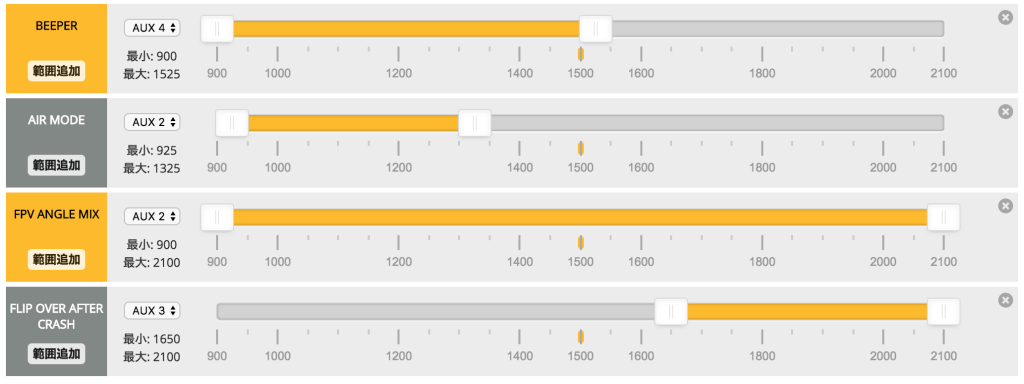
- Acroモードの時にAIRとなる様に設定しています。
- FPV ANGLE MIXを常時オンに設定します。
- BEEPERはお試し中なので「Project Mockingbird V3」とは関係ないです。
以上が「Project Mockingbird V3」の設定です。
まとめ
モーターを0802サイズに変更するだけでフライト時間が伸びる事が解っていますので、次のステップとしては0802モーターへ載せ替えて4分のフライトを体験して貰えたらと思います。
[box class="box28" title="合わせて読みたい"]
-

UR65/US65に0802モーターに変えてパワーアップしてみた!
以前よりUR65/US65のモーターを0802の16000-19000kvに変えるとパワーも飛行時間もアップするという情報がありましたのでチャレンジしてみる事にしました。 外でもパワフルに飛ばせるうえ ...
[/box]