今回はブラシフープでProject Mockingbirdの設定をしてinductrix FPVの様に飛ばしやすくなるかを確認してみたいと思います。
ブラシレスフープではProject Mockingbird V3でしたが、ブラシフープではProject Mockingbird V1.1bと少し前に公開されたバージョンですが、実際に設定してみると快適でした。
いや、これ本当に凄いでよね!飛ばしやすくなりすぎて感動しました。
では早速設定に入りましょう!
Project Mockingbird V1.1b ブラシモーター版
こちらの動画ではバッテリー設定をミスしていますがご愛嬌で…。
前提としてブラシモーターではモーターのサイズにより設定が異なりますので注意が必要です。今回は716モーター編となりますので、皆さんのモーターサイズに合わせて設定を変更してね。
尚、Project Mockingbird V1.1bではAngleMode、AcroMode、HrizonModeをサポートしています。
事前に今回利用したパーツ類など
今回、ブラシフープで利用している環境を事前にお伝えしておきます。このパーツ類でめちゃくちゃ飛ばしやすくなりました。普段はUR65の影に潜めているBETAFPVのフルパーツセットです。
ブラシフライトコントローラ&カメラはお好みで用意してね。
moccaはBETAFPVF4フライトコントローラ、Z02カメラの組み合わせです。
BETAFPV V4フレーム

BETAFPV 716モーター(17500kv or 19000kv)

31mm 3枚ペラ

セットならこちら。

キャノピー(お好みで)

後はフルセットドローンを買っちゃうって手もあります。

Project Mockingbird V1.1bではQX65での評判が良いです。価格もバッテリー1本であれば6,000円台とお手頃なので購入しやすいのも魅力的ですね。
モーターは615、Betafligth3.2.2でマニュアル通りの動作環境を実現できます。
バッテリーはBETAFPVなどでHVタイプを購入して利用しましょう。
Setp1 バックアップを取得
CLIタブでバックアップを取得します。
以下の図の様に「dump all」と入力しエンターを押します。その後に表示された内容をテキストなどに保存して下さい。元に戻したい場合にはこちらの内容を入力して「save」で元に戻ります。
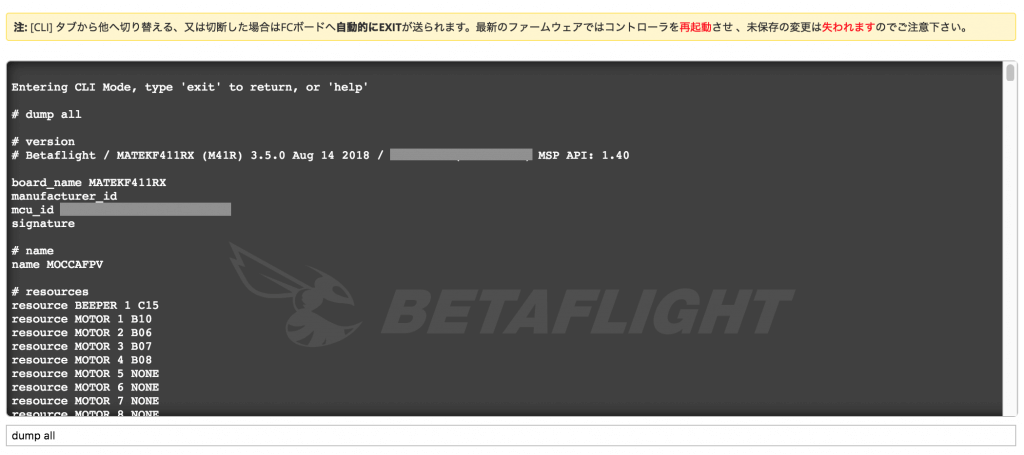
Betafligthはバージョン3.4.0を利用しました。
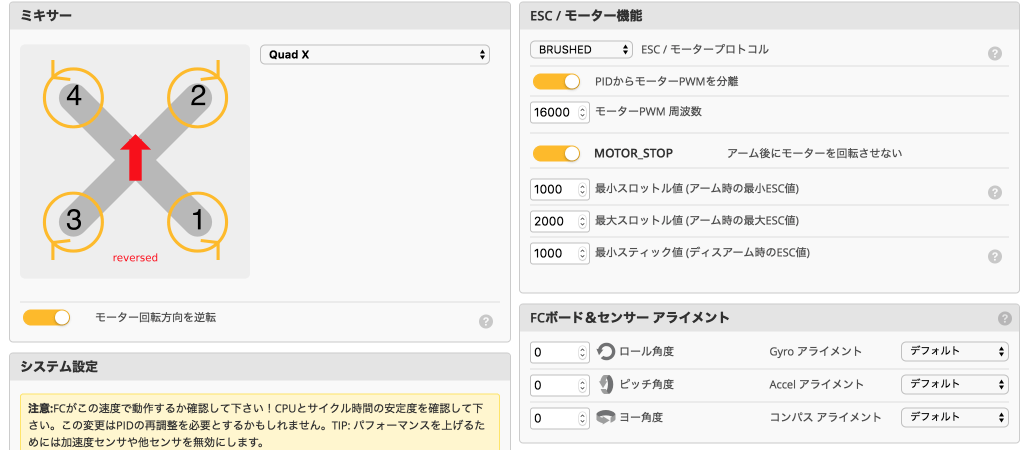
Step2 基本設定
モーターを逆回転、モーターPWM周波数を16000に設定します。他に異なる項目があれば同様に設定します。
ブラシフープの場合にはモーターは物理的に逆につける必要があります。
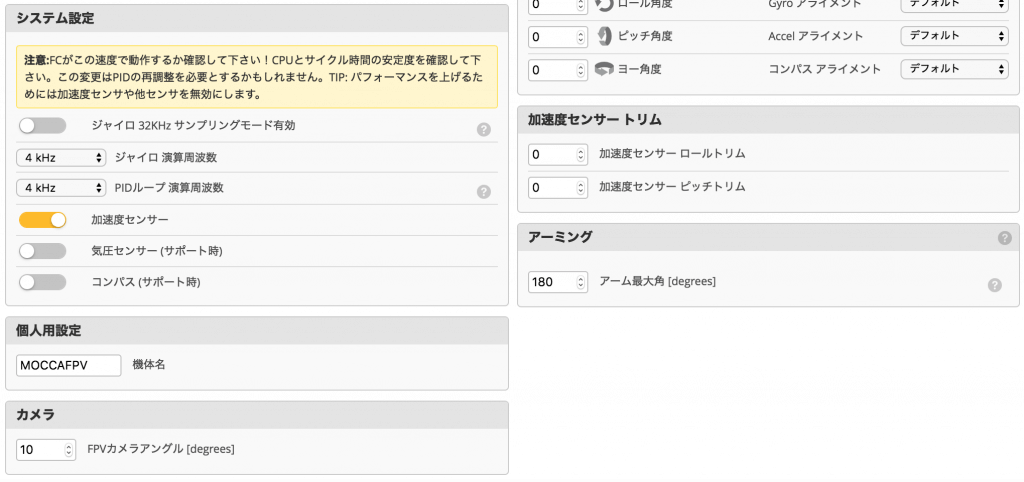
ジャイロ演算周波数、PIDループ演算周波数を4kHzへ。アーミングは180に設定します。
アーミングは角度がついてしまってもARMできるので色々と便利ですので設定を変更しておきましょう。カメラ角度はお馴染みの10ですね。
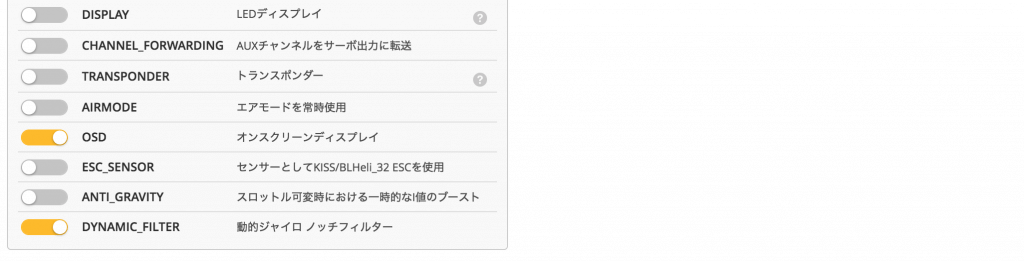
ダイナミックフィルターをオンに設定します。
Step3 PID設定
PID設定では3つのレートプロファイルを設定します。Angle、Acro、Hrizonです。個人的にはHrizonモードは不要だと思いますが必要に応じて設定すると良いと思います。
尚、ブラシモーターでは個体差やモーターの劣化などにより設定に幅があります。機体は小刻みに揺れたりドリフトする場合には値を変更しベストな状態に仕上げましょう。
Pは高く、Dは低くが基本的だと理解しておくと良いと思います。(Dもある程度上げていますが、上げすぎるとモーターが熱くなるので注意です。)
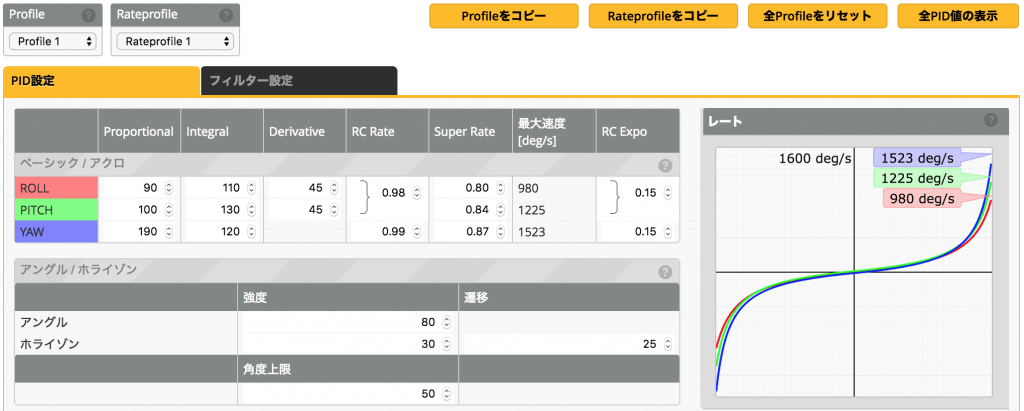
以下の様に設定しますが、レートが若干異なると思います。RC Rateを利用しながらだいたい同じ値になる様に調整して下さい。
AcroMode設定
強度、角度などについては以下の画像の様に設定します。
(尚、レートプロファイルの設定は1を設定すると2、3へと引き継がれます。)
PIDの値を以下に、スロットルExpoを0に設定します。
一応補足しておきますが、最大速度は同じになるとは限りませんので近い値になる様に設定をします。RC Rateと Super Rateの値で最大速度が決まります。
個人的にPIDよりも影響があると思っていますので、それぞれの意味合いについては別途記事にしたいと思います。
PIDコントローラ設定をD影響力0、その下を1、移反重力モードをステップ。強さ1、しきい値は350に設定します。

Angleモード設定
プロファイルは2を設定します。
PIDやRC Rateなどを以下の様に設定します。
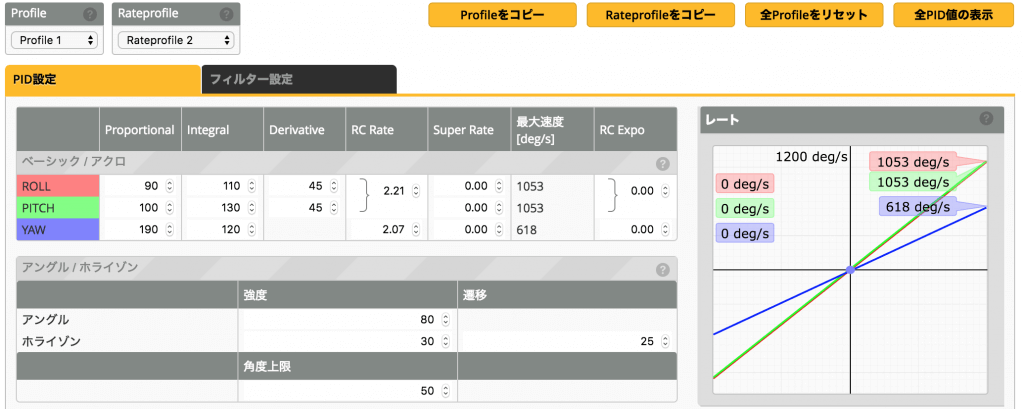
反重力モードはAcroと同様です。
Horizonモード設定
図と同様に設定します。反重力モードはAcroと同様です。

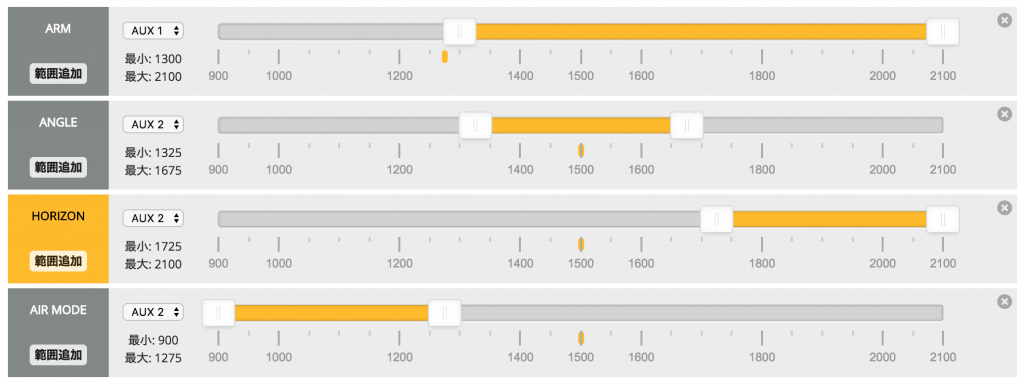
Step2 ARM設定
以下は好みに応じて設定します。見てもらうと解ると思いますが、moccaの場合はHrizonは設定していますが利用しない事を前提にしてます。
スロットル加算が必要であれば30%をプロポ側で設定します。指で補正する場合には不要ですね。
Step4 プロファイル選択の設定
Angleモードの際にプロファイルをスロット2へ変更します。AUXについては設定内容により異なります。

まとめ
以上がv1.1bの設定内容です。
相変わらず初めのうちは設定が上手くいかずに四苦八苦、5時間くらいかかってしまいました。結果、少しづつ中身も理解できる様になってきたので困った時にも応用が利く様になってきたので良いって事でw
フライト時間はお家フープでは300mAhバッテリーで約4分でした。外で飛ばしたら少し短くなるかと思ってます。飛ばした感じは「最高!」の一言ですね!ここまで飛ぶんだったらブラシフープでも良いかなって思えるくらいです。
そのうちV3がリリースされると思いますので楽しみです。