
UR65は非常に優れたブラシレスドローンだと実感しています。
最近はAcroモードの練習をしていましたが、インターネットで調べてみるとドローンレースの世界大会の上位者でもAngleモードを利用している様です。
「Betafligth」のPID設定などを変更することで「inductrix FPV」と同じ様に飛ばそうといのが「Project Mockingbird」。
「inductrix FPV」は2016年に販売され世界を圧巻したTinywhoopの元祖です。
実はこの記事は色々と思う事があり公開するかどうかを悩みました。
何故か「Project Mockingbird」については現在のところ日本ではあまり詳しく触れられていません。(少なくとも知っている方はいる筈、特に一部の方)
ただ何れ日本でもその日が来るであろうと思い公開する事にした次第です。
UR65のProject Mockingbird設定
UR65のProject Mockingbird V3はAgle&Acroモードでの操作
“Project Mockingbird” の設定は以下のページで紹介されています。
今回紹介している「UR65 Project Mockingbird V3」はブラシレスモーターのUR65をベース機としていますが、US65で設定した場合でも同じ様な飛行が可能だという情報があります。
しかしながら、BETA65Xなどの機体についてはモーターのシャフト軸が異なるなどの為、設定をアレンジする必要があると書かれています。この辺りは実機が無いのでその差を検証できていません。
「Project Mockingbird V3」はAgle&Acroモードでの操作を想定しHorizonモードでの飛行については触れられていません。その理由は「inductrix FPV」ではHorizonモードが存在しない為、比較のしようがないという事だと理解しています。
飛行時間は4分(そんなに飛んでるかなぁと思いつつ、バッテリーケーブル変えて試してみます。)
追記:飛ばし方にもよりますが300mAhのバッテリーを利用した場合4分の飛行も可能でした。但しバッテリーケーブルもBETAFPVのケーブルへ交換していますので元々UR65に付属しているケーブルを利用している場合には異なると思われます。
[memo title="MEMO"]
これから記事にしている際の推奨パーツは後ほどアップグレード用としてまとめてご紹介します。
[/memo]
UR65のProject Mockingbird V3設定アレンジ版
UR65のProject Mockingbird設定の前置き
これからご紹介する内容は「Project Mockingbird V3」を設定する際に上手く設置が出来なかった点などを考慮した内容としています。
まずは標準のモーター(17,000kv)を利用している場合にはプロペラを4枚に変更して下さい。
プロペラは反対方向にセットします。
Betafligthは3.4以上、ECSをBLheli16.7へ。D8モード(Frysky)です。
変更前にバックアップを忘れずに実施して下さい。CLIタブで「dump」コマンドを打ってからファイルを保存して下さい。
[alert title="注意"]BLheliへ接続する場合にはバッテリーを接続しておいて下さい。[/alert]
UR65のProject Mockingbirdの「BLHeli – Configurator」設定
MotorDirectionをReversに変更します。
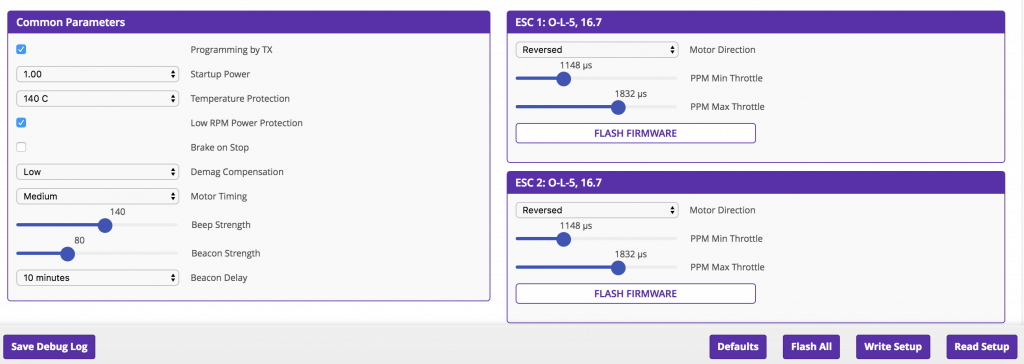
ブザーの設定を行う場合には以下の設定を行って下さい。
- Beacon strength:音の大きさ → 最大
- Beacon Delay:何もしなく鳴ってから音を鳴らすまでの時間 → 1minutes
-

UR65はブザー不要!ブラシレスモーターは音が出せるんです!
お外でドローンを飛ばす時に何処に行ってしまったのか解らなくなってしまう事ってありますよね? 私も先日、BETAFPVのF4コントローラーで組上げたドローンを草むらに落としてしまい見つけ出すのに1時間く ...

UR65のProject Mockingbirdの「BetaFligth」設定
「基本設定」項目の説明です。
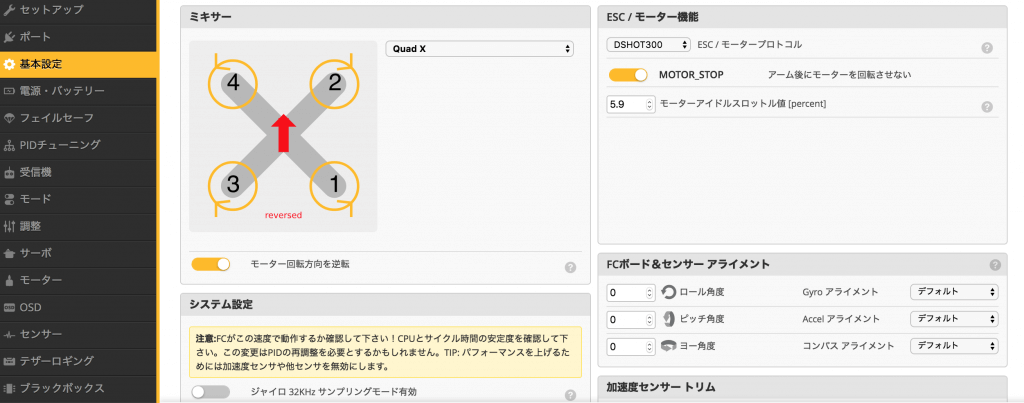
- モーター回転方向を逆転
- 「ECV/モーター」→「DSHOT300」
- 「モーターアイドルスロットル値」→「5.9」
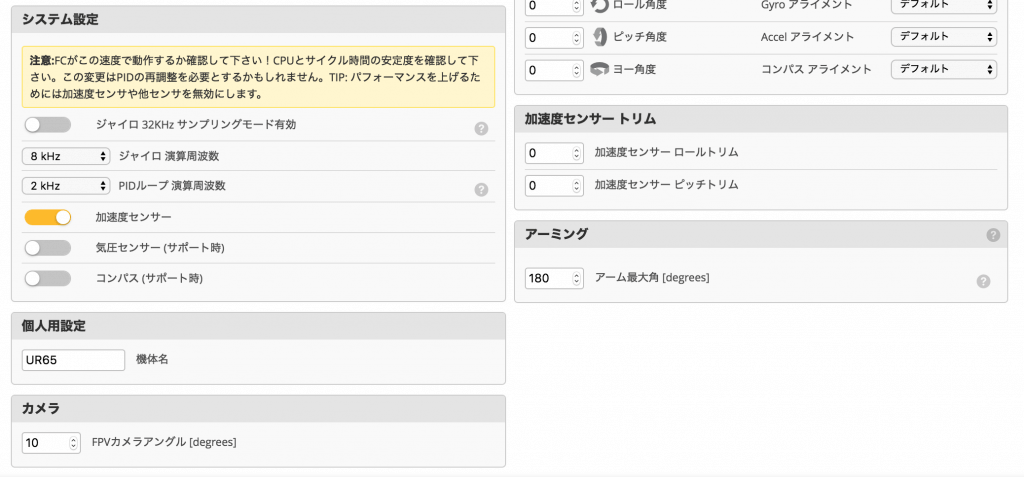
- 「PIDループ」→「2kHz」
- 「加速度センサー」→「オン」
- 「カメラアングル」→「10」
- 「アーミミング」→「180」
アーミングはタートルモード用ですので厳密には設定しなくてもOKです。
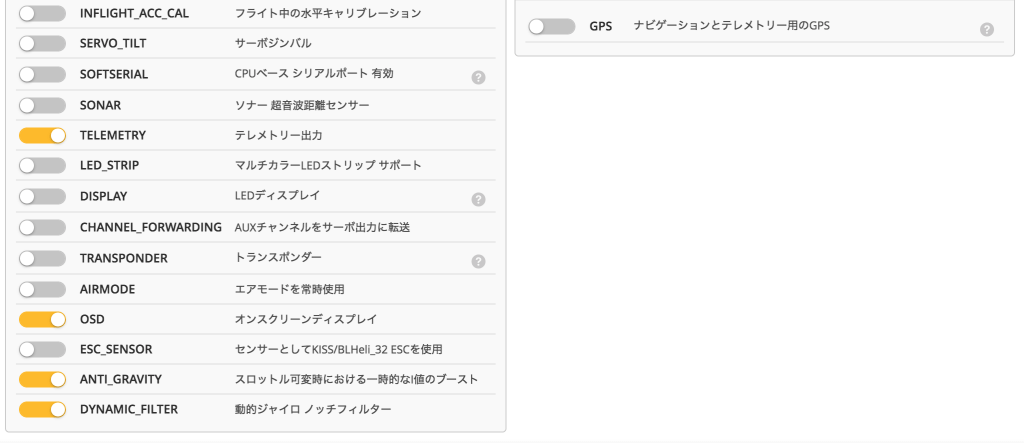
- 「ANTI GRAVITY」→「オン」
- 「DYNAMIC_FILTER」→「オン」
続いてPIDチューニングを行なっていきます。
「Acroモード」の「PIDチューニング」の説明
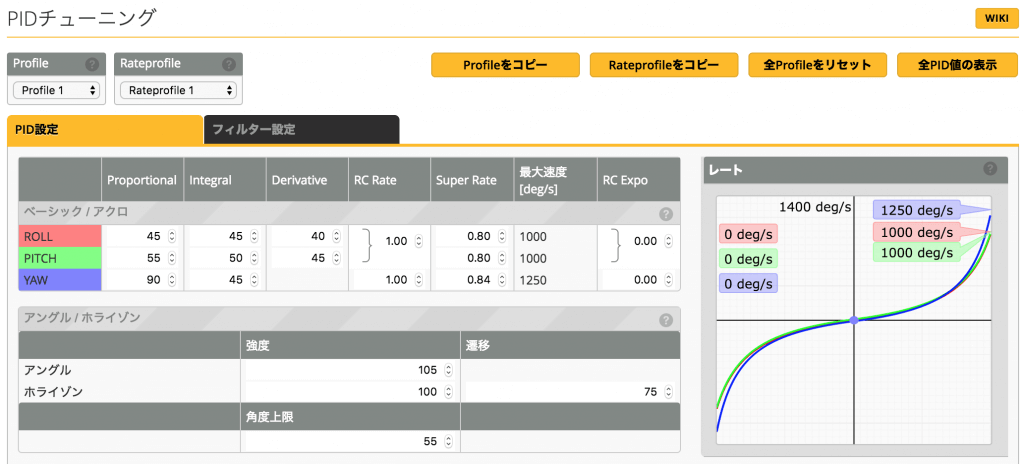
「Profile1:Rateprofile1」ではAcroモードの設定を行っていますので「Project Mockingbird V3」の説明とは異なります。これはRateprofileの切替が上手く動作しなかった為にアレンジをしています。
- 「ROLL」「RITCH」「YAW」の上記の設定を画像に通りに
- 「アングル/ホライゾン」の上記の設定値を画像通りに
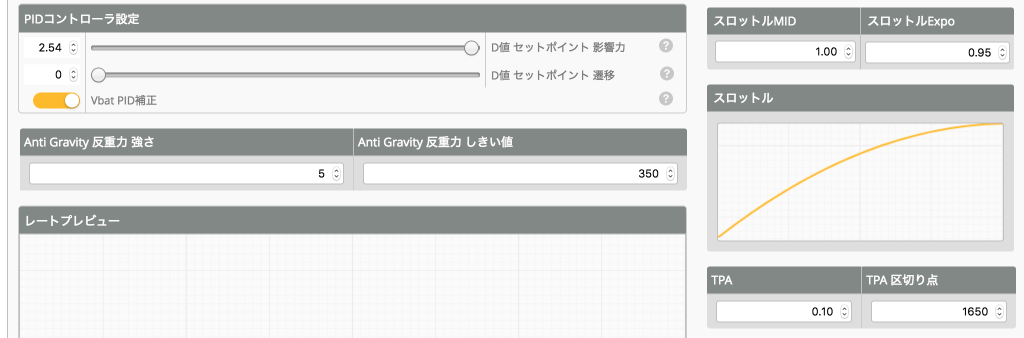
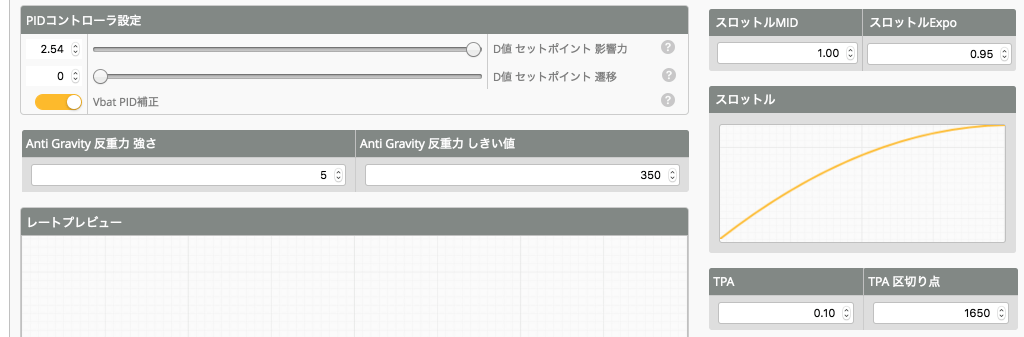
PIDコントローラ設定&スロットルカーブを設定します。
プロポが「Taranis QX7」の場合はで「Project Mockingbird V3」に設定方法が書かれていますので確認して下さい。
尚、UR65の場合にはBetaFlightの設定でも問題はないとの情報がありました。US65の場合にはプロポ側での設定が推奨されています。
- 「PIDコントローラ設定」を画像の通りに
- 「スロットルMIDとスロットルExpo」を画像の通りに
[alert title="注意"]
設定方法をプロポ側に変更してみました。
- スロットルMID:0.5
- スロットルExpo:0
T8SGの場合、「Mixer」→「THR」→「Comples」→「Mixsers3」
「Page2」→「Nux:add」→「Src:AIL」→「 Curve:ABSVAL」→「Scale:30」
「Page3」→「Nux:add」→「Src:ELE」→「 Curve:ABSVAL」→「Scale:30」
Scaleの値は適宜調整で大丈夫です。
[/alert]
「Angleモード」の「PIDチューニング」の説明
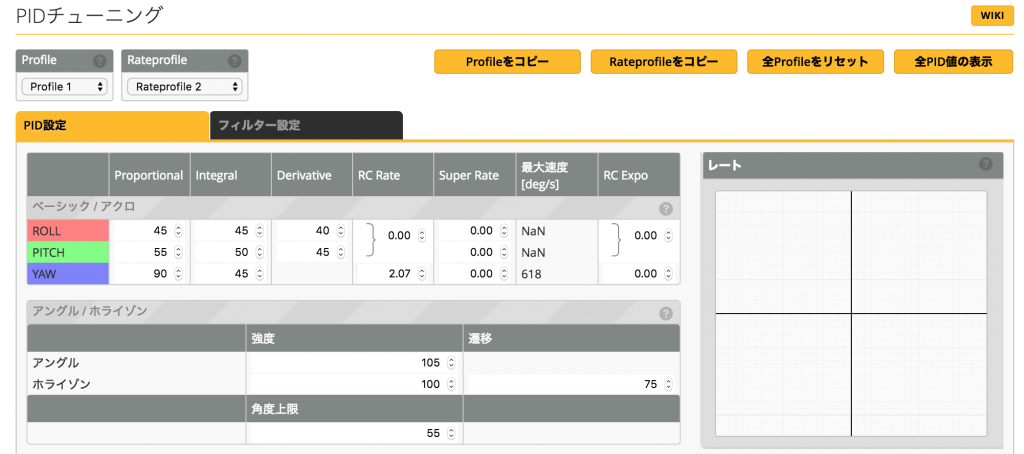
「Profile1:Rateprofile2」ではAngleモードの設定を行っていきます。
- 「ROLL」「RITCH」「YAW」の上記の設定を画像に通りに
- 「アングル/ホライゾン」の上記の設定値を画像通りに
PIDコントローラ設定&スロットルカーブを設定します。
バッテリー設定では電圧設定を行います。
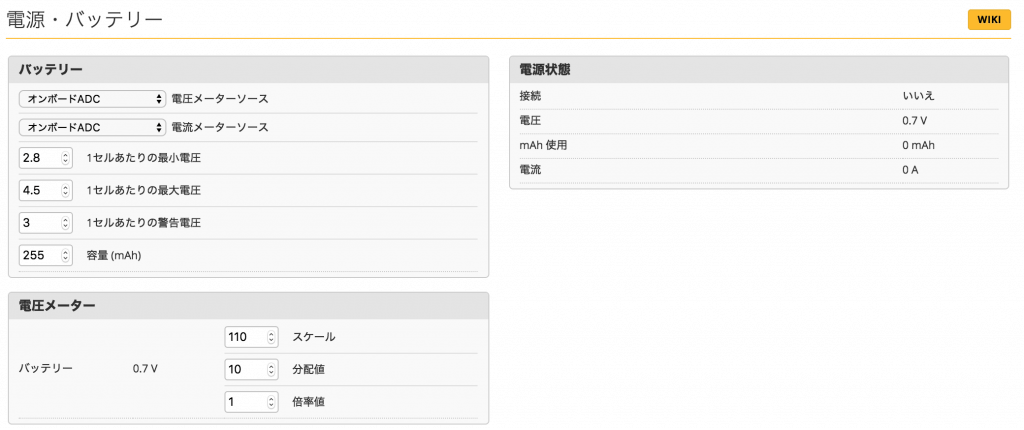
上記の設定値で全く問題ありません。LowBatteryで帰還後は3.7-3.8V付近です。
Rateprofileの選択の設定をします。
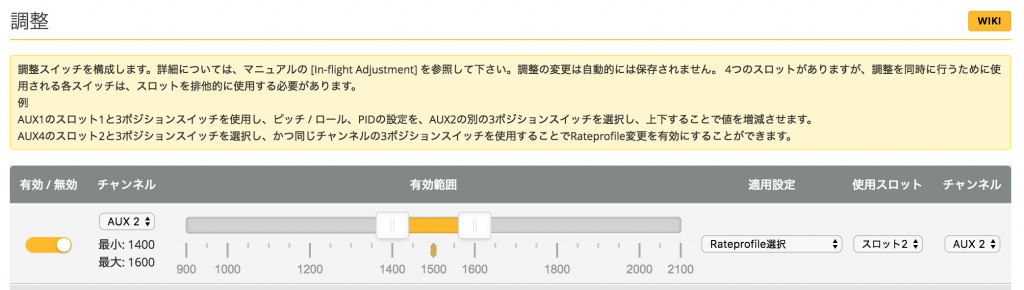
Angleモードの際にRateprofileが2となる様に設定します。
実際にアームを動かして貰うとわかりますが、1600以上にした場合にprofileが3に選択されてしまうかと思います。なのでRateprofile1にAcroモードの設定をしています。
モード設定をします。
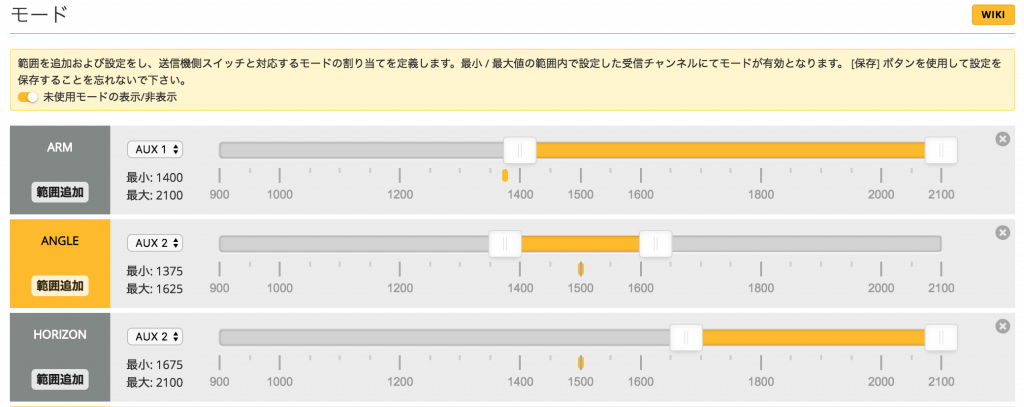
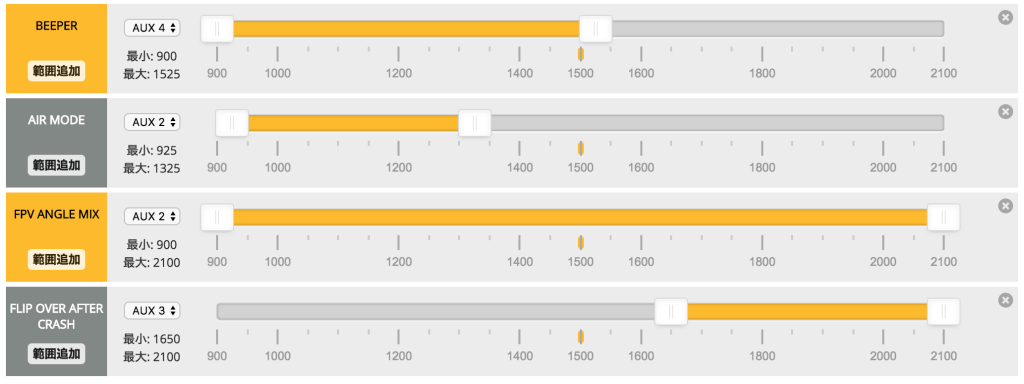
- Acroモードの時にAIRとなる様に設定しています。
- FPV ANGLE MIXを常時オンに設定します。
- BEEPERはお試し中なので「Project Mockingbird V3」とは関係ないです。
以上が「Project Mockingbird V3」の設定です。
CILのみでしか設定できない項目がありますが現時点では設定していません。今後、どこかのタイミングで設定してみようかと思っています。
「Project Mockingbird V3」アップグレードパーツ

プロペラの4枚への交換は必須です。

Eachine E010 E010C E010S RCクワッドローター スペアパーツ ブレード プロペラ
Happymodelのモータだとよりパワフルになると推奨されています。

Happymodel SE0703 19000KV 1S Brushless Motor for RC Drone FPV Racing
その他としてBETAFPVのフレームを利用していますが「Project Mockingbird V3」では推奨されていません。これはフレーム折れ対策として利用しています。

BETAFPVのバッテリーケーブル

UR65のProject Mockingbird V3テストフライト動画
250mAhバッテリーでフライトテストを行いました。
高速かつ低空での飛行でも安定しています。まだ数回の飛行なので慣れてくればより早く飛ばせると考えています。
後ほど、300mAhでのフライト動画もアップします。
まとめ
「Project Mockingbird V3」の設定を行うと明らかに飛行が変わります。まだ部屋の中でしか操作していませんが操縦性が向上しブラシレスドローンの挙動を抑えられている雰囲気です。
[memo title="外で飛ばしてみました!"]
記事を書いた11月10日の日中に外で飛ばしてみましたが正直素晴らしいの一言でした。皆さんにも体験して貰いたいです!
[/memo]
また、直線飛行時には常に機体が下がる事を抑制する設定の為、今までと同じ様に操作した場合には少し上に機体が上がると思いますが、それも「Project Mockingbird V3」の特徴となります。
こうやって設定してみると「inductrix FPV」はバッテリーケーブルに問題があったものの、素晴らしいTinywhoopであったと言えるでしょう。