
「BetaFlight4.1.0」がリリースされて暫くたちますが、ようやく試してみようという事でインストールから初めてみたいと思います。
最新版は「BetaFlight Configurator 10.7.0」となっていますので、早速ダウンロードしたいと思います。
尚、今回はGoogle Chrome版で進めて行きたいと思います。
BetaFlight4.1.0を利用して見よう!
BetaFlight4.1.0のインストール方法
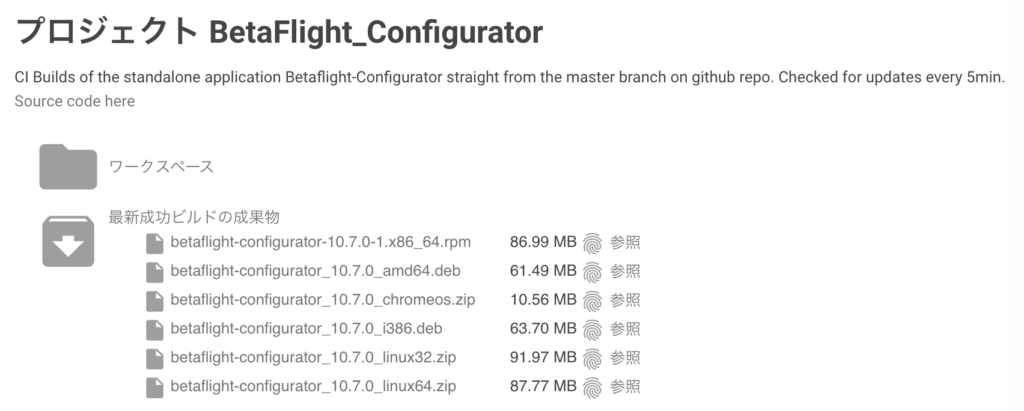
[sanko href="https://ci.betaflight.tech/job/BetaFlight_Configurator/" title="プロジェクト BetaFlight _Configurator" site="BetaFlight"]
以下のところから利用環境に合わせてダウンロードして下さい。
Chromeの場合には「環境設定」→「拡張機能」→「デベロッパーモード」にしてからZIP解凍後のファイルを選択すれば利用可能になります。
こちらの方法は「Papalagiさん」の記事を参考にさせて頂きました。最近、一歩先に試して貰えるので非常に助かってます。

起動してみましたが、起動画面は以前と変わらずです。(ダークモード)
ドローン本体のファームウェアをアップデート
今回はHX100のファームをアップデートしてみたいと思います。いつも利用しているのなので、これが一番違いが解るかなぁと思っていて。その前に今の設定をみておきましょう。Dump allも合わせて取得しておきます。
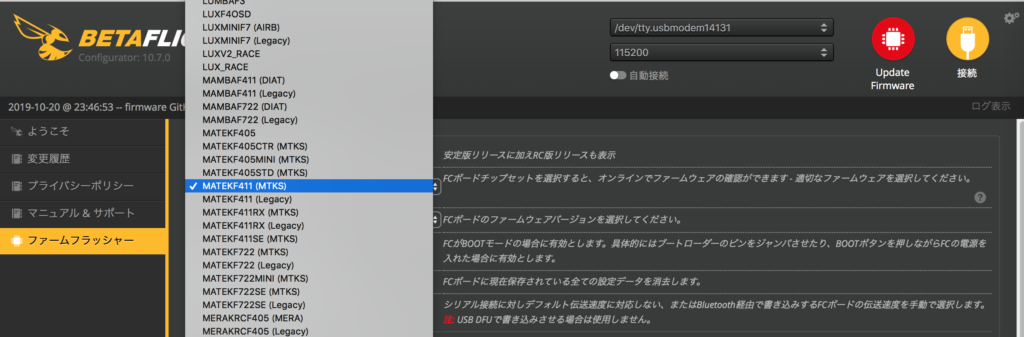
ファームウェアをアップデートしようとしたところ、MTKSとlegacyの2タイプが出て来て戸惑いましたが、MTKSの方をチョイスしてみる事にしました。
- MTKS = BetaFlightとFCのファームが分割されているらしい
- legacy = 今までと同じ概念らしい
この辺りもPapalagiさんのサイトを参考にしています(他力本願でごめんなさいw)
取り敢えずやってみないと解りませんので進めます。
ファームウェアをアップデートしようとしたところで上手く行かないので、10.6.0のMac版をインストールしてアップデートしました。何でか解りませんがこちらは上手く行きました。
BetaFlight Configurator起動
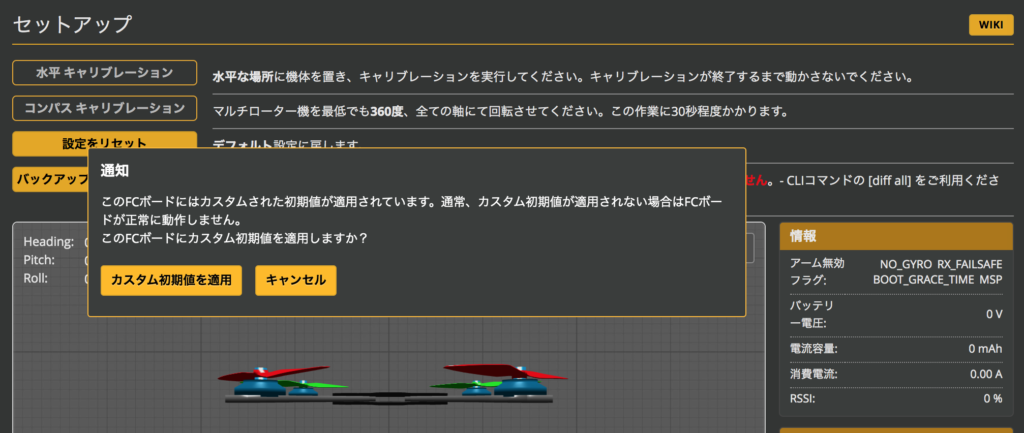
いきなり躓く。カスタムされた初期値が設定されているらしく、初期値が設定されていない場合には正常に動作しないので適用しなさいという事で「適用」選択(流されるがままw)
モーター機能
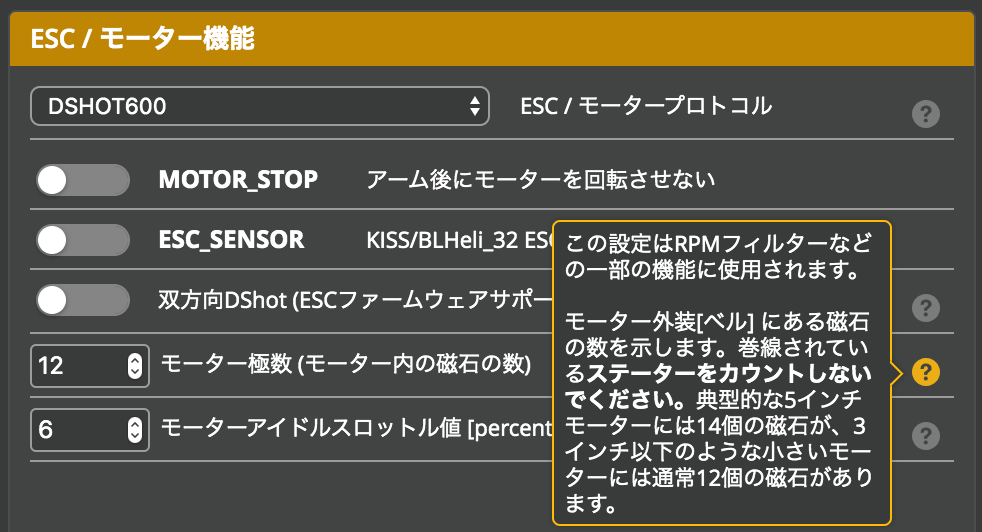
ちょっと迷ったのが新しく出て来た項目でモーター極数(Motor poles (number of magnets on the motor bell))でどうやら実装されている磁石の数。
3インチ以下のモーターでは12個らしい。念の為にHX100のモーター1103で数えてみたら12個でした。
VTX周波数の設定

初期では設定されていないので「このページ」に進みます。からVTXテーブルを引っ張ってきてアップロードすると利用できる様になます。
参考動画などもあってやっていましたが、う〜ん。って感じでした。
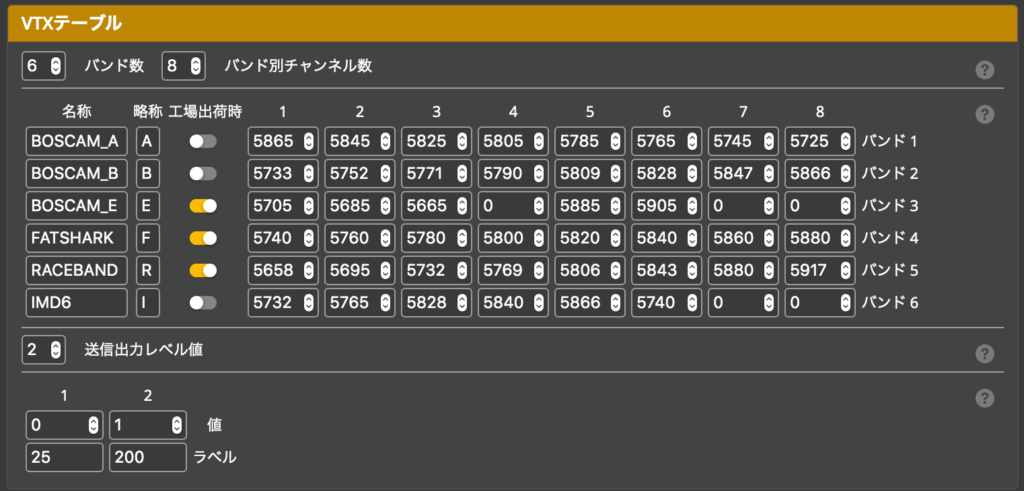
日本で利用できるのだけで良いので、後でぽちぽち直します。
PID設定

これが噂のPID設定です。下のところにスライダーがありました。少し触ってみたところ。
- 基準乗算値:全ての値を基準値から*x倍
- PD値 バランス:PのRollとPITCHのみが変更
- P値D値 強さ:PとD(最小含む)の値を基準値から*x倍
- スティック応答の強さ:FreedForwardの値を基準値から*x倍
という感じでした。Pの値を調整したい時は2で出来るって事ですかね。もう少しマニュアルも読み込んでみたいと思います。
PID設定の詳細について
PID設定の詳細については以下の記事で紹介しています。少し試してみたところデフォルト設定でも十分に飛ばす事が可能なので、順次移行しても問題なさそうです♪
-

BetaFlight4.1.0を利用して見よう!「4.1 Tuning Notes」マニュアルの一部日本語化!
前回の記事では「BetaFlight4.1.0」の導入方法について記載しましたが、今回は主だった点について日本語化していきたいと思います。 と言ってもGoogle先生に頼りっぱなしですが、英語というだ ...
フィルター設定
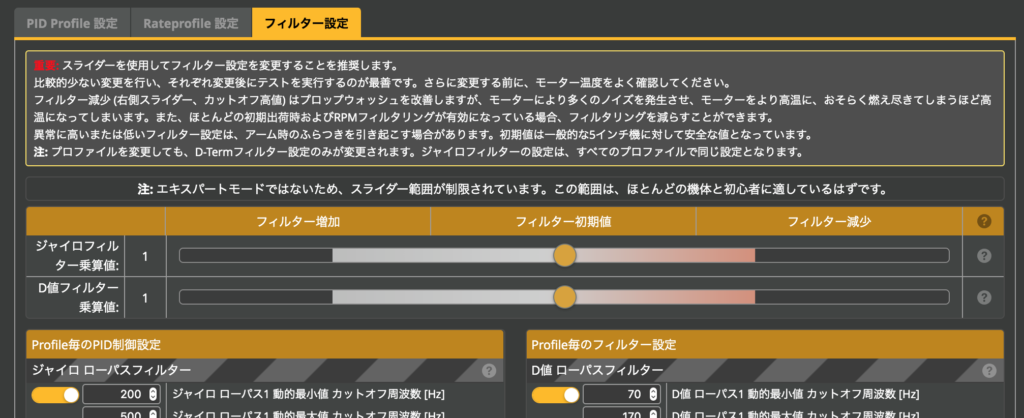
フィルター設定もスライドになっていました。BetaFlight3.5.xからの変更だので、フィルタはどうするか悩み中。
このままでも良くってモーターの温度を見ながら調整してね的な事が書かれていました。緩ければフィルターをあげる事が出来るって事だと思います。
まとめ
取り敢えずは1機導入できました。早めに慣れちゃった方が良いかな?って思ったりするので順次入れ替えて行きたいと思います。