
Mobula7とは75mmの1SLipoバッテリー2本で飛ばすことができるマイクロブラシレスドローンです。
1Sでも飛ばすことが出来ますので、室内、野外での両方で飛ばす事が出来ますので、現在大人気でこれからも相当売れると思っています。
Mobula7を追うように2Sブラシレスドローンが販売されていますので、どれを選択するかは好みの問題でもありますが、Mobula7は非常に飛ばしやすいと評判の機体です。
今から購入するのであればEachine TRASHCANも選択肢に入れても良いと思います。
BanggoodでEachine TRASHCANを見てみる
ちなみに「Eachine TRASHCAN」は手元に届くのを待っていますので、届き次第レビューしますね。
Mobula7のBetaFlight設定
Mobula7ととプロポのバインド設定

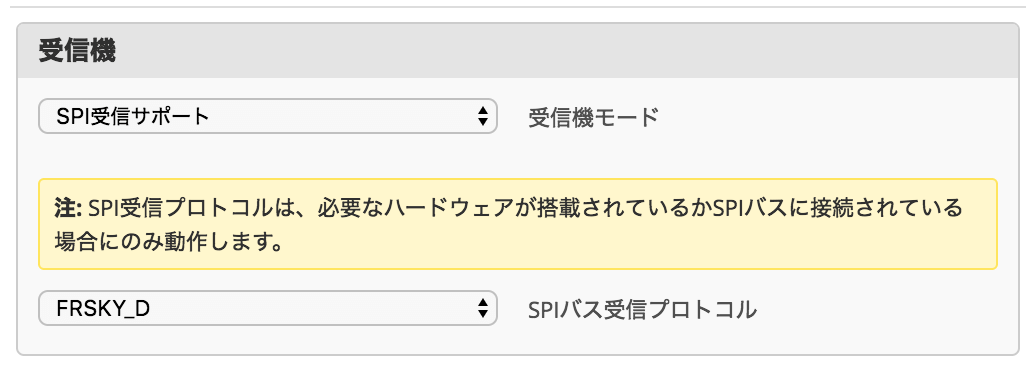
Fyskyで設定しますが、出荷時はFrskyXになっていますのでFrskyD(D8)でバインドしたい方はBetaFligthで設定の変更が必要ですので注意してね。
Mobula7のフライトコントローラーのバインドボタンを長押しLEDライトが点滅したらプロポ側でバインドを開始します。(バインドボタンは機体前から見て右手にありますので、細長い棒があればキャノピーの取り外しは不要です。)
するとLEDが点灯に変わりバインド成功となります。
Mobula7の本体の電源はそのままにしてプロポ側の電源をオフ、オンしバインドが可能かを再確認しておいてね。
BetaFligthダウンロード&日本語化
UR65の記事でも書いていますが再度掲載です!
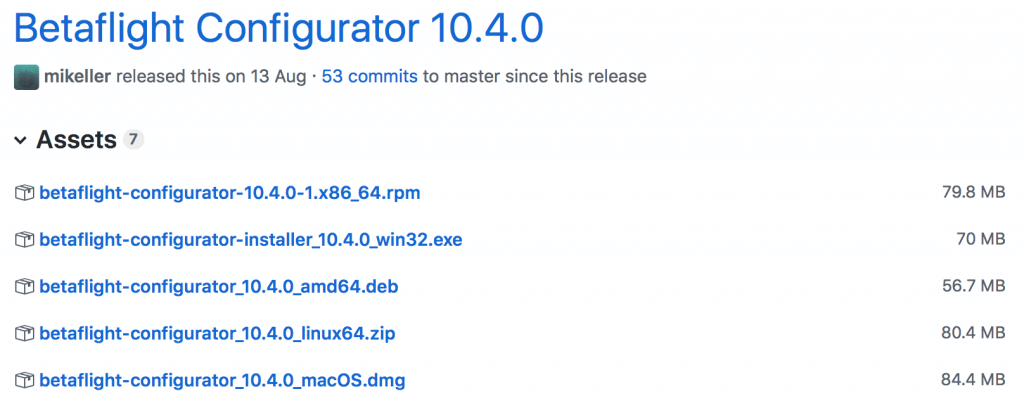
BetaFligthは10.4.0で以下よりダウンロード。
[sanko href="betaflight/betaflight-configuratorBetaflight Configurator" title="ページタイトル" site="Betaflight Configurator"]
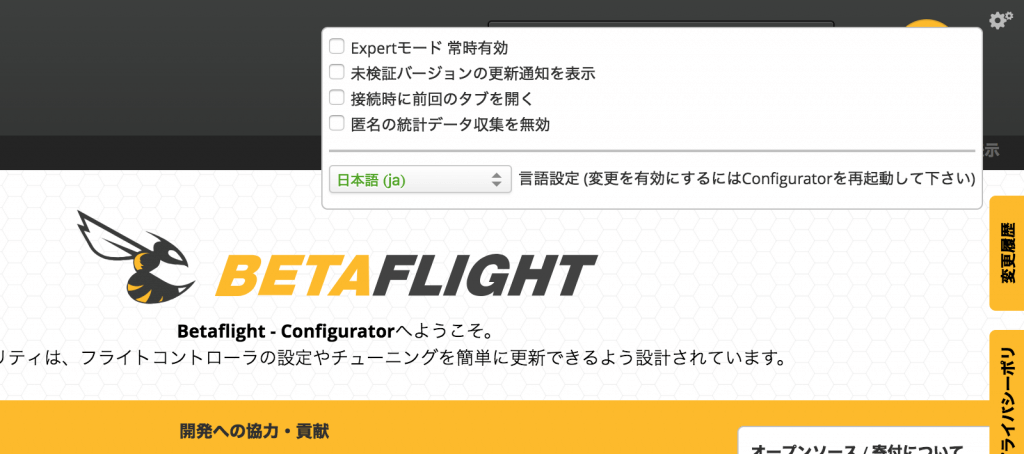
BetaFligthを起動し右上の歯車→言語設定で日本語(ja)を選択しましょう。再起動すると日本語になります。
Mobula7をBetaFligthで設定
FrskyDの方はプロトコルを変更してからバインドしてね!
フリップオーバー(逆さになった時の起き上がり)の為にアームを180へ変更します。

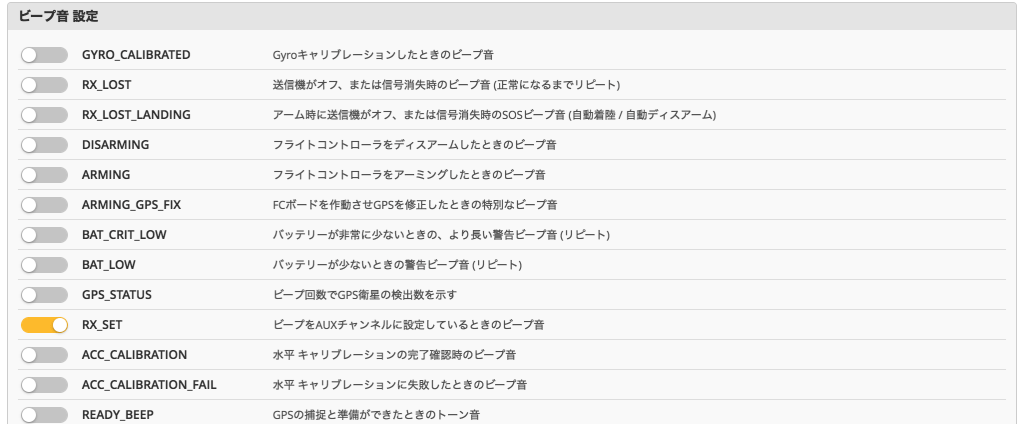
万一、プロポの電波が受信できなくなった時に様に一応、モーターからの音を出す設定をしておきます。

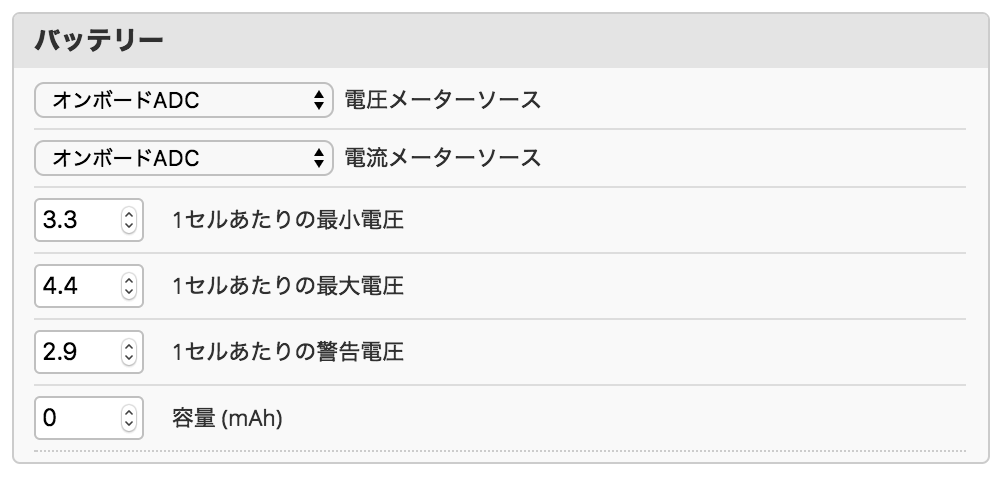
バッテリーは最大値を4.4に変更し始めから出てしまうアラートを消します。
最小電圧はこのままでも行けそうなので変更なしで飛ばして見てます。状況に応じて少し下げるかも知れません。
[alert title="注意"]
設定を間違えてました。最小電圧2.9V&アラート3.1Vへ変更しました。
フリップすると3.2Vを切るので3.0〜3.1Vが良いです。
[/alert]
ブザー設定をします。ARM時に音がなる様に設定していきます。
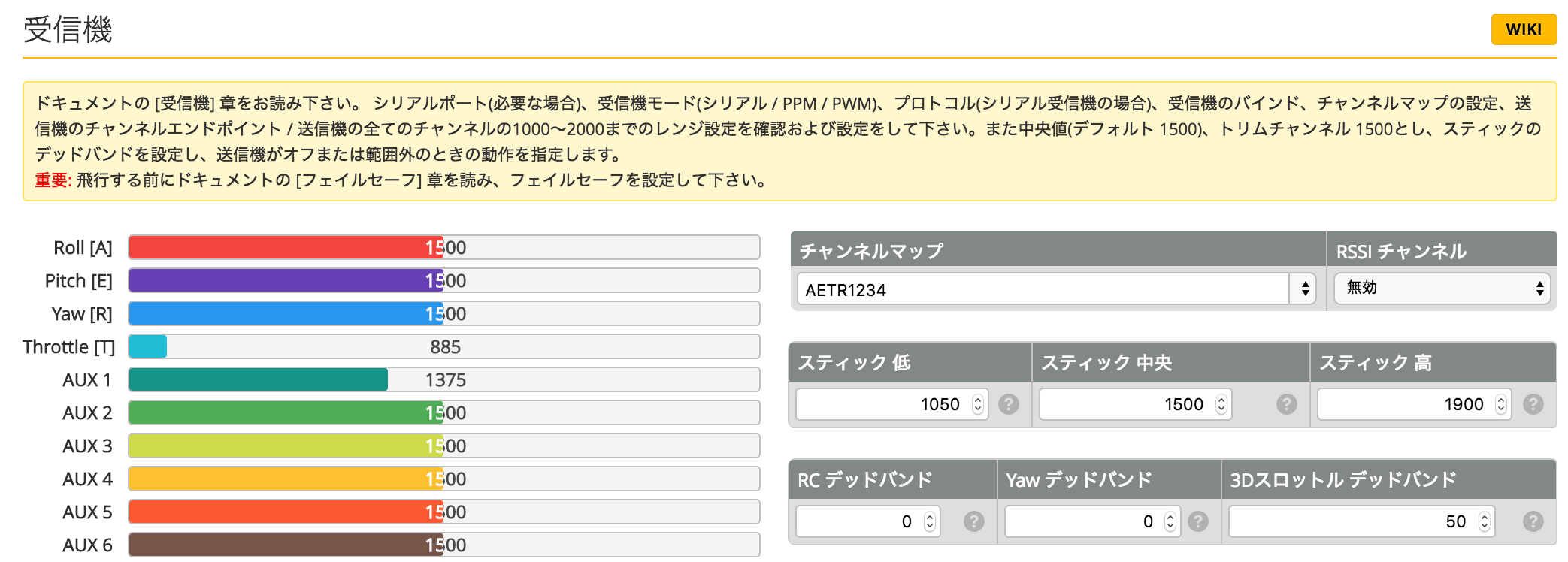
受信機設定はチャンネルマップをAETR1234へ変更します。(Frskyの場合)
プロポの設定は基本的にUR65と一緒なので以下の記事を参考にどうぞ!
-

URUAV UR65のBetaFligth設定!プロポ設定もまとめました!
URUAV UR65のブラシレスマイクロドローンBetaFligth設定備忘録です。 正直かなりハマってしまい所要時間は4時間超えでした。詳しく記事にして貰えている方も多いですが、今後UR65などのブ ...

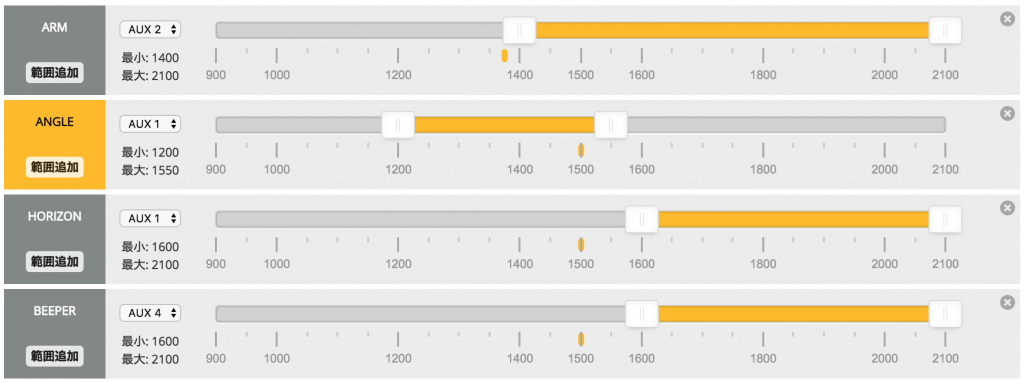
AUXの設定です。moccaはちょっと変わってるかも?
- ARM = AUX2
- 飛行モード = AUX1(下からAcro / Angle / Hrizon、Acro時にはAirモード)
- フリップオーバー = AUX3
- ブザー = AUX4

OSD設定です。基本的にはお好みで良いと思います。以下はmoccaの設定ですので参考までに。


ちなみにタイマー2の設定はSECONDって書いてありながら分単位ですので注意ですね(笑)
フレーム折れが結構発生するかも?

レビューを見ているとフレームが割れてしまう事があるみたいです。UR65の時の様ですね。軽い分、少し脆いので予備のフレームを用意しておきましょう。
Mobula7はレシーバーの電波の届く範囲が狭い

Frsky XM+ Micro D16 SBUS Full Range Mini Receiver
今日、mobula7でお外でフープしていて解った事が。Mobula7はレシーバーの電波の届く範囲が極端に狭いです。
電波ロスで何度落ちたことやら。という事でレシーバーも合わせて購入しておきましょうね!
まとめ
今日、2Sで3回ほど飛ばして見ましたが「めちゃくちゃ楽しい!」1Sとは別次元でした。もの凄く加速が良くパワーがある為だと思いますがとフリップがやり易かったです。
ノーマル設定ではAngleモードだと機体が流れるので、PDIを変更しもう少し硬い感じに仕上げていきたいと思っています。でのAcroモードはそのままでも良いかなぁと思っていますので、プロファイル選択で切り替えるかと思います!
後日、モーター逆回転、PID設定の変更を行ってみたいです。
[box class="box28" title="PID設定を変更してみました!"]
-
Mobula7でProject MokingBirdの設定をして見たらどうなるか試してみた!
Mobula7は1Sのバッテリーでも飛ばせるし、実際に飛ばしている人も沢山いるってところまでは解っていましたので1SではProject MokingBirdで飛ばせるんだろうなぁって思ってはいました。 ...

[/box]