
今回の記事ではドローンにGPSを搭載してGPSレスキューを利用する方法についてです。
過去にも記事にしていますが、私の目標も達成できました。また、ようやく解って来ましたのでコツも含めて記事にしておきたいと思います。
尚、ドローンにGPSを搭載すると、緯度、経度、ホームポジションからの距離、速度などの情報を取得する事が可能です。またGPSレスキューを利用する事で、自動帰還する事も出来ます。
注意点としては空撮機の様なレベルでの操作は出来ません。(私には現時点では解らないだけだと思われますが。。)
BetaFlightでGPS設定をしてGPSレスキューをする!
利用したのはBN-220 GPS
Beitian Dual BN-220 GPS GLONASS Antenna Module TTL Level RC Drone Airplane
GPSも色々な物があり前回はBN-880を利用していましたが、今回はBN-220を沢山購入して見ましたのでそちらを利用してみました。
Specification
- Electrical Characteristics
- Chipset : 8030-KT
- Receiving Format : GPS,GLONASS,Galileo,BeiDou,QZSS and SBAS
- Frequency : GPS L1,GLONASS L1,BeiDou B1,SBAS L1,Galileo E1
- Channels : 72 Searching Channel
GPS選びのポイントはチップセットが8030-KTってのを選択するのがポイントらしいです。後、同じチップセットでもBN-880とBN-220では明らかにサテライト数の取得感度に差がありました。
何でなのか理由は不明ですが、私の環境ではBN-220の方が断然上です。
ちなみにBN-880はコンパス付きですが、コンパス付きの方が精度が良い、但しちょっとした事でコンパスがおかしくなってしまうのでキャリブレーションをちょいちょいする必要があるってお話でした。
私は、BN-880でもコンパス無しでテストしたのでコンパスがどれくらい有用なのかは不明です。しかし、目的はだいたいの距離、海に向かってフライトしている時などのいざっていう時の為のGPSレスキューが利用したい。というところなのでコンパス無しで問題ないと判断しました。
海ぽちゃすると色んな意味で困りますので(。>﹏<)
ドローンへのGPSの配線
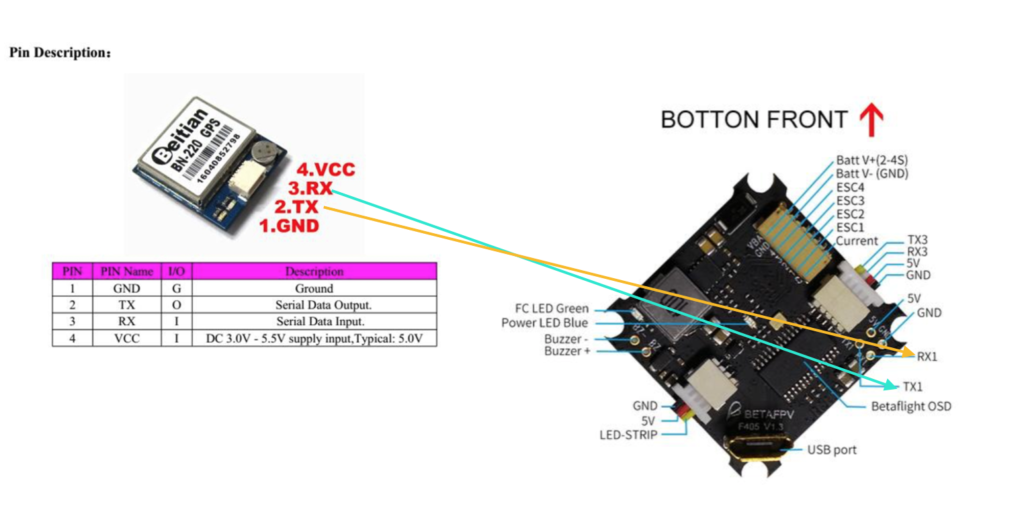
難しいお話ではなく非常にシンプルです。
GPSのTXをFCのRXへ、GPSのRXをFCのTXへ、双方向です。VとGはそのままに接続すればOKです。
上記のFCはBETAPFVのBlheli32のFCとESCが別体のタイプですが、MANBAのF405などのFCの場合には工夫しないと取り付けが出来ないので、既製品のドローンを購入した場合にはVTXの配線を変更する必要があります。
BETAFPVの試作機は以下の記事でパーツも紹介しています。
-

BETAFPV Beta95X Frame Kit が販売開始!BETA85Xからの組み替えも可能!
BETAFPVから「Beta95X Frame Kit」が販売開始となりました! BETA85XHDの販売が開始となった時から、そのうち95mmフレームも販売になるんだろうなぁと思ってはいましたが、結 ...
ドローンへのGPSの設置場所

GPSの設置場所は注意が必要で、VTXは受信機などからはなるべく離して設置して下さい。
現にVTXの側に設置した場合にはGPSの取得が殆ど出来ずに設置場所を変更しました。また、GPSの上には障害となるものは無い状態にしておきます。
上記の写真はフープへ設置(強力両面テープで固定、意外と取れない)したケースですが、この状態であれば問題なくGPSを取得する事が出来ました。
BetaFlightのGPSの設定方法
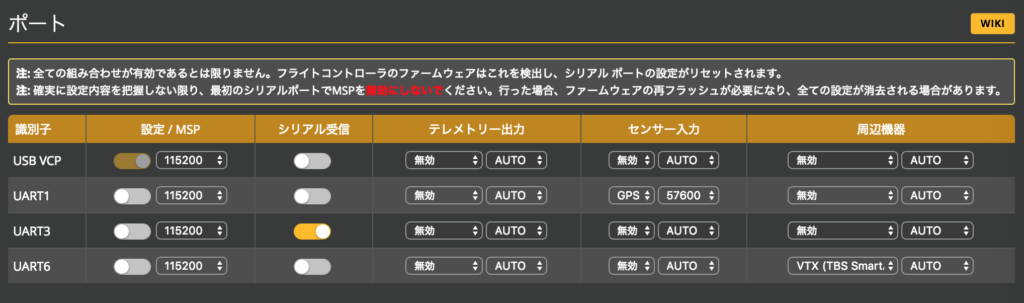
ポート設定は接続したUARTに対してセンサー入力を設定します。速度は57600としていますがAUTOを選択して保存しても同じ結果となりますので、どうやら自動的に決まる模様。
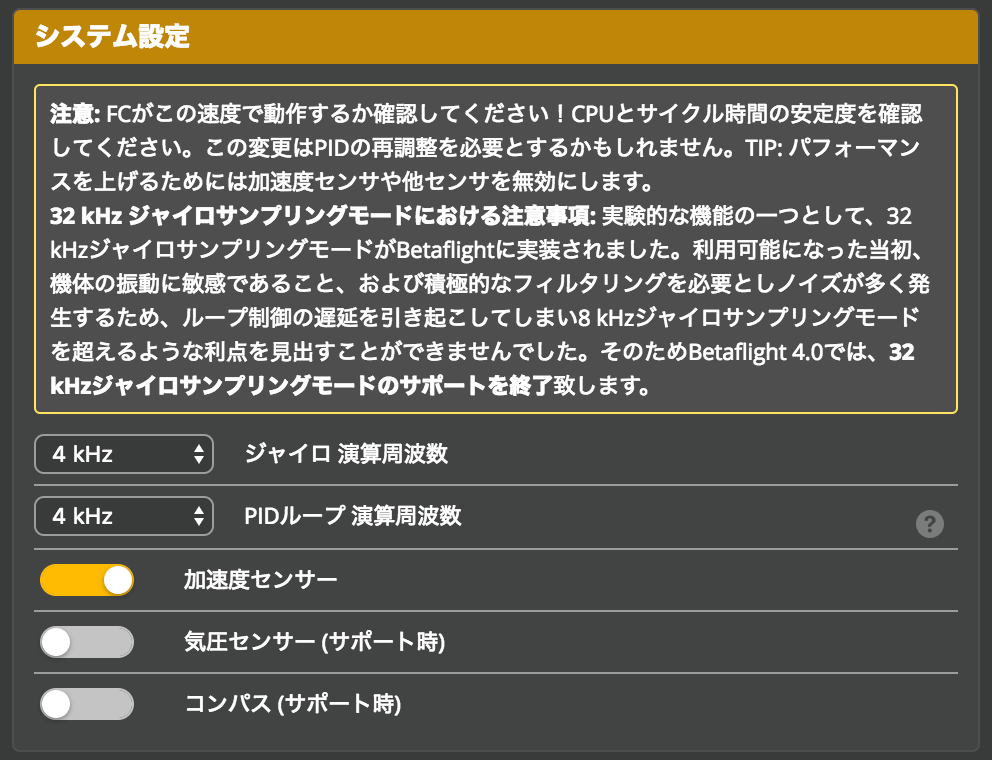
基本設定で加速度センターをオンにします。
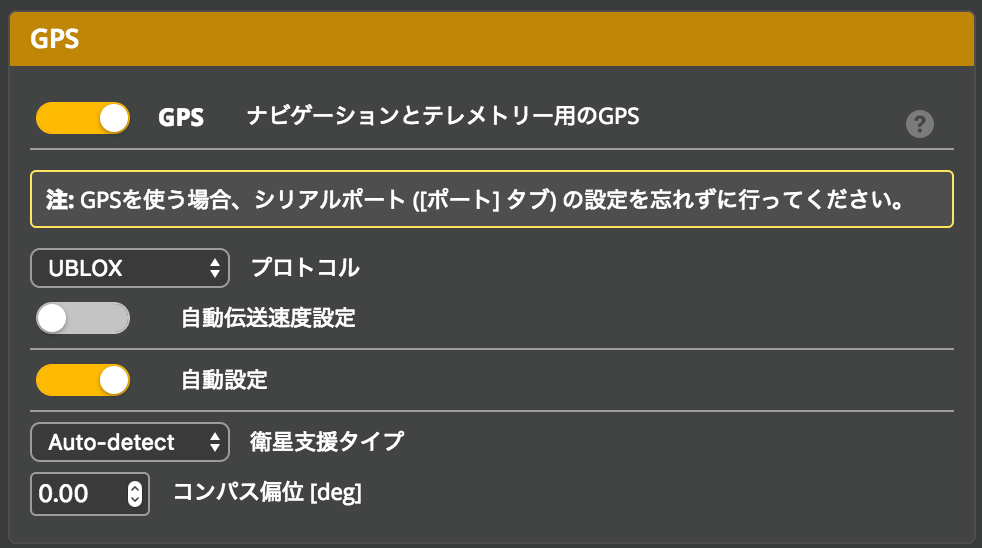
基本設定でGPSをオンに。BN-220の場合にはUBLOXを選択します。その他は初期設定のままでOKです。

その後にバッテリーを接続し、BetaFlightの画面上記のGPSマークが付いている事を確認して下さい。
ドローンにバッテリーを接続したからの待ち時間
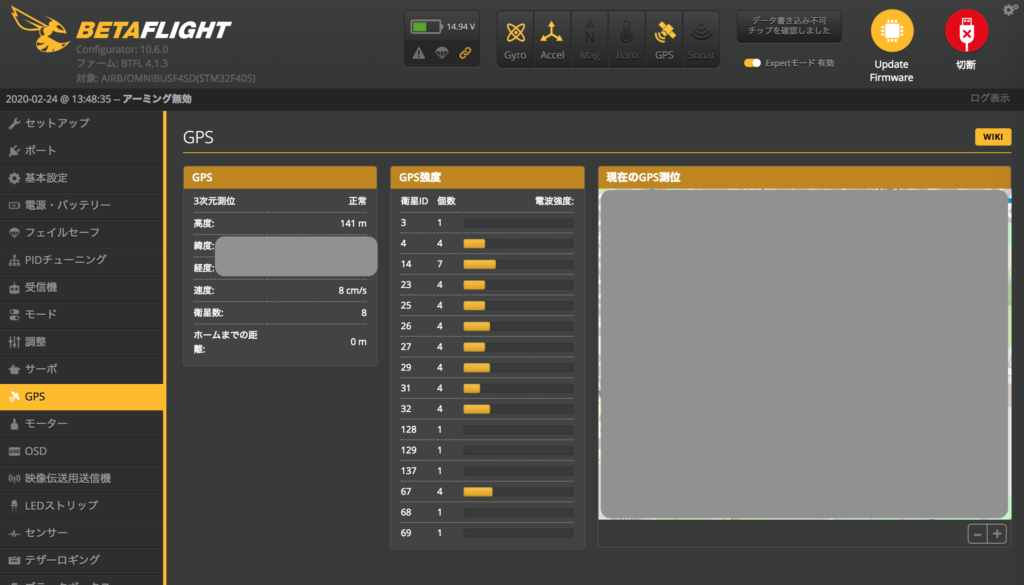
BetaFlightに接続したままでバッテリーを接続しインターネットに繋がる環境でGPSタブを見るとGPS強度や経度・緯度やGoogleMapなどの位置情報を確認する事が出来ます。
今回はお家の近所で試したのでマスクしました。。
実はGPSはバッテリーを繋いでからフライト可能なサテライト数になるまでに待ち時間がありますがこれが結構長いです。また、初回(本当の初回)は捕捉までに時間が掛かる様で5分とか10分くらいは掛かるケースがありました。
この辺りは正確な情報ではなくって経験則からです。そのうち、もっと詳しい方が出てくるかも知れないので、その方にバトンタッチという事で(/´△`\)
一度GPSを捕捉すると結構簡単にフライト可能なサテライト数になりますので、配線の間違いがなければ上空に何も無い場所で粘って下さい。
GPS rescueの設定
BetaFlightでエキスパートモードにするとフェイルセーフのタブが表示されます。
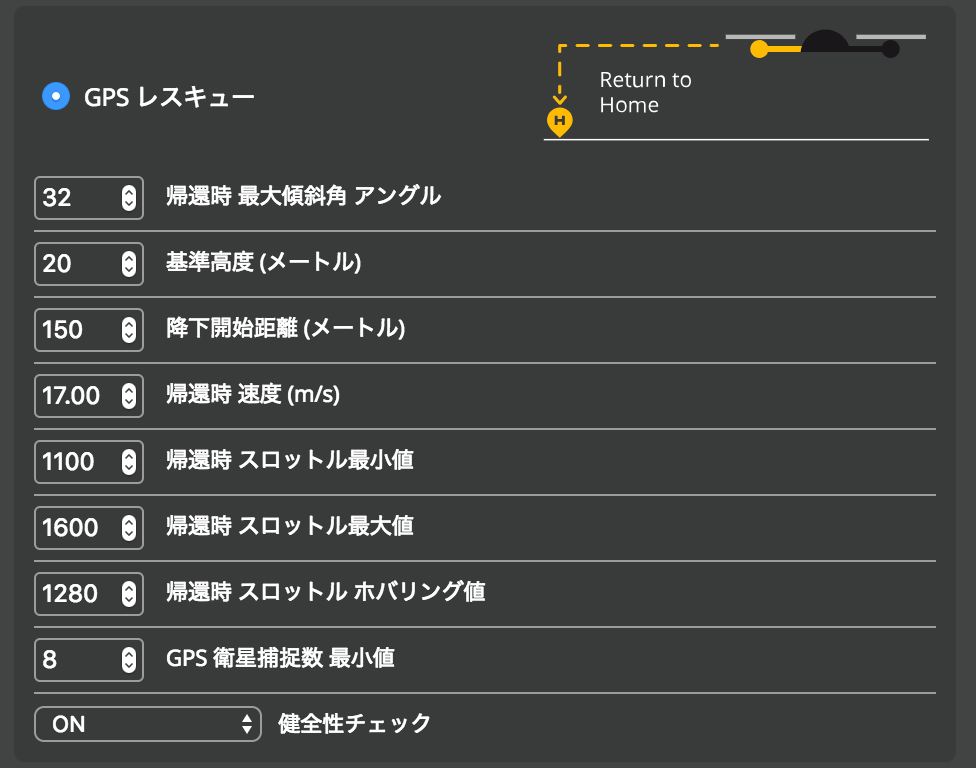
最大傾斜角
GSP RescueがオンになるとAngleモードで帰還する事となります。
最大傾斜角は風などの事も踏まえて調整した方が良さそうで、特に小型の場合には風に負けて戻ってこれない可能性もありますね。
基準高度
GSP Rescueがオン、つまり帰還の際にはフライト時の最大高度もしくは設定高度のいづれか高い方が優先される事となります。
尚、BetaFlightのファーム4.1.3からは最低が20mでそれ以下には設定出来なくなっていました。
下降開始距離
下降開始距離と言われると直線距離を想像してしまいがちですが、実際にはホームからの距離で高さも考慮されます。つまり100mとした場合には案外下降開始が直前だったりする訳です。
帰還時速度
まだこれから色入りと試して見る必要があると思っていますが、帰還時速度は所謂、ドローンが飛ぶ早さです。どれくらが妥当かと言われると微妙なところで初期値は20ですがそこそこ早いスピードで戻ってきます。
バッテリーの容量の問題もあったりするので、一概に何が正解かは使い手次第というところだと思いました。(GSP Rescueがオンでローバッテリーとかあったりもしました。。)
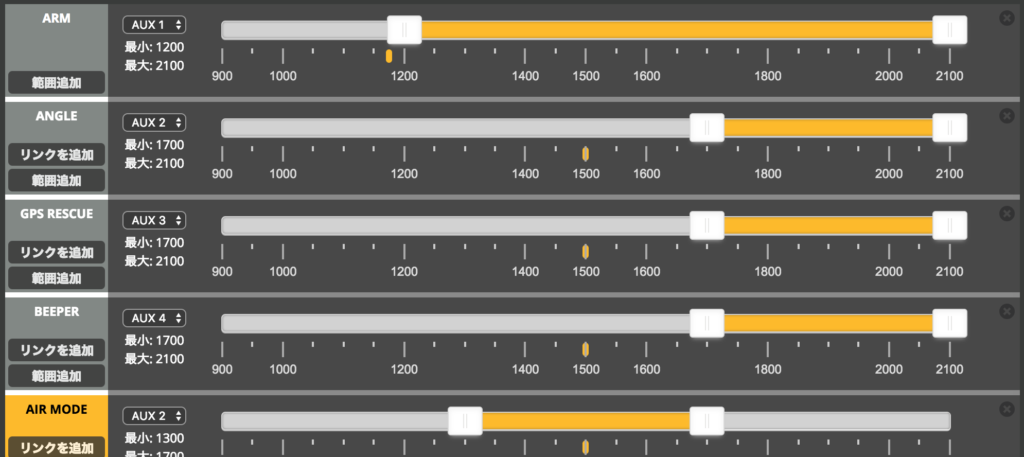
後はモード設定を追加すればGPS Rescueが利用可能という事になります。
まとめ
今回は「BN-220 GPS」を利用したBetaFlightの設定方法などを紹介しました。
GPSの記事が何かの役にたつかと言われると非常に微妙な感じがしていますが、FPVドローンにGPSが付けられて自動的にホームまで戻って来れるという事が繰り返し出来る事を証明できた訳ですから、きっと何処かにニーズがあると思っています。
あ、動画は一応、撮ってあるので後日アップします!