
先ほども記事にしましたがEmuFlightをベースとしてJESC 48khz & Dshot300を導入してその違いを確認したいと思います。
スムースなフライト、そして、フライト時間の改善を予想しています。
では、早速ですが導入を進めて行きましょう。
[alert title="注意"]
色々と調べていくとEmuFlight自体の機能としてIMUFという機能があり、それがフライト時間を長くしているのだろうとの推測となりました。結局テストも足りないので真相は私には解りませんでした。
[/alert]
EmuFlight & JESC 48khz & Dshot300を導入

EmuFlight configuratorを導入
先ほどの記事からサイトへ行き、ツールをダウンロードします。
-

ファンの方向け|僕がブログを書かなくなった理由と感謝の気持ち
皆さま、お久しぶりです。 このアイキャッチ画像、大好きなんですよね。 UR65に出会わなかったら、こんなにドローンにハマる事もなかったでしょう。 最近、稀にTwitterを更新したりする事はあるんです ...

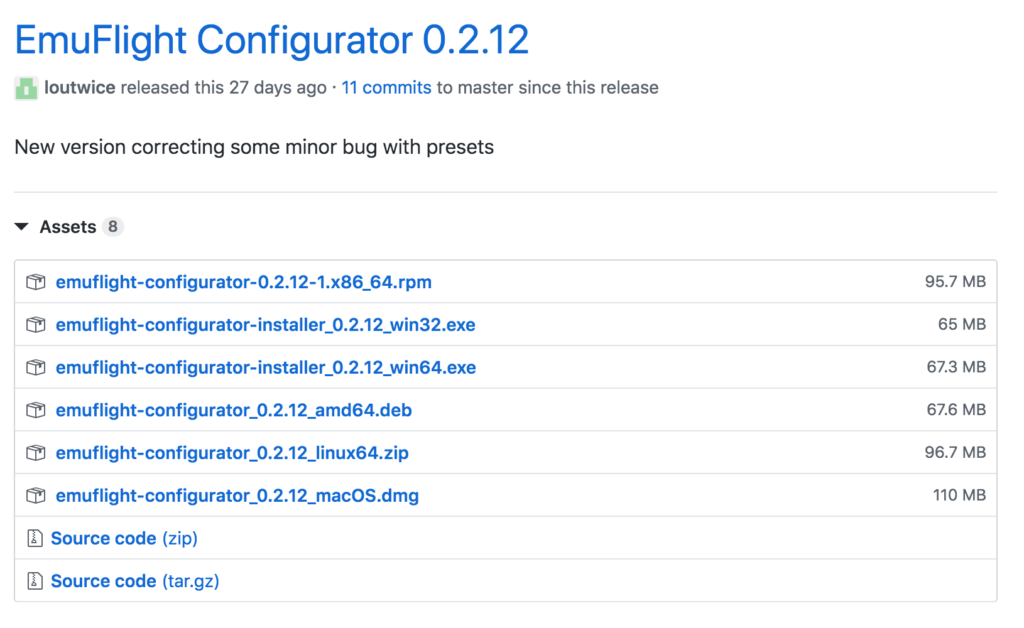
私はMacOs版を選択しました。

右側のアプリケーションフォルダーに移動して完了です。
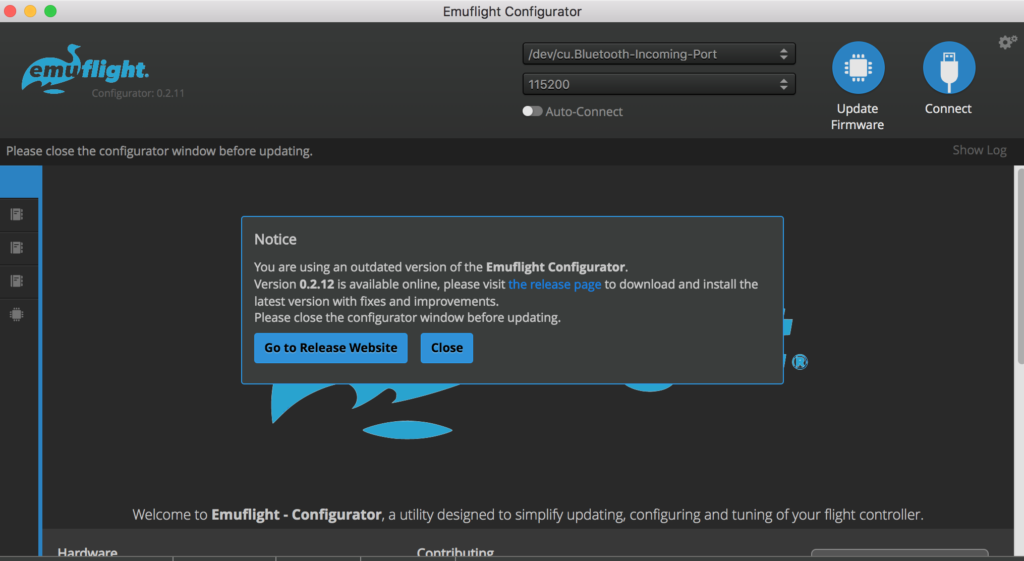
見た目はブルー基調ですが他は同じに見えますね。
私のMeteor65は「MATEKF411RX (M41R) 」でしたので、ドローン本体を接続して同じファームを探します。
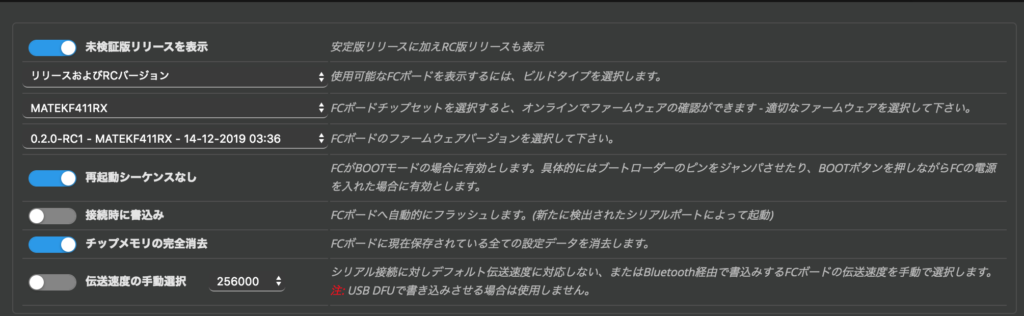
対象がありましたので、フラッシュして見ましょう。日本語になっていますが、トップ画面の下側に言語選択する箇所がありますので、そこから選択します。
10.6以降のBetaFlightでも同様です。

接続してみると内容はBetaFlight4.1以降と同じ見た目になっていました。するとPIDなども同様の仕組みとなっていると理解すべきでしょう。
但し、フィルタ設定は最新のBetaFlightとは異なる様です。もう少し調べておく必要がありそうです。この辺までくるとBetaFlight 4.1.1でも良いんじゃないかと思ってきたりもしました。
取り敢えずはこのまま進めて行きましょう。
JESC Configurator PWM導入
[memo title="MEMO"]
私は有料版を導入しましたが無料版でも十分らしいです。気になる方はお試しして下さい。
[/memo]
以下のサイトからソフトをダウンロードしましょう。
[sanko href="https://github.com/jflight-public/jesc-configurator/releases" title="JESC Configurator" site="GitHub"]
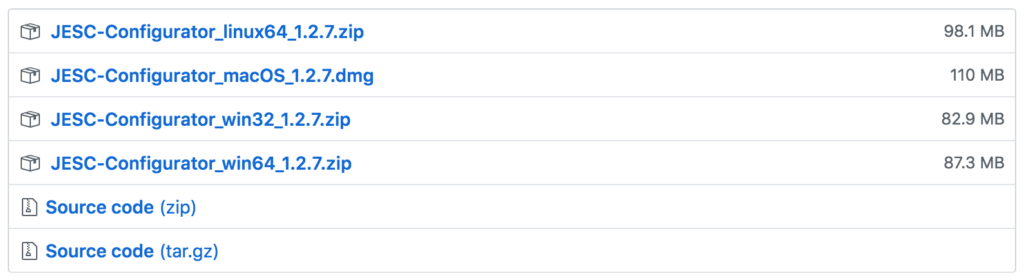
私は1.2.7をダウンロードしました。
EmuFlightもそうですが、そこそこの容量になりますので500MBくらいはディスクに空きが必要です。JESC Configuratorも別途、記事にした方が良さそうかも知れませんね。後で検討しておきましょう。(書いているうちにダウンロード完了)
移動して準備完了です。
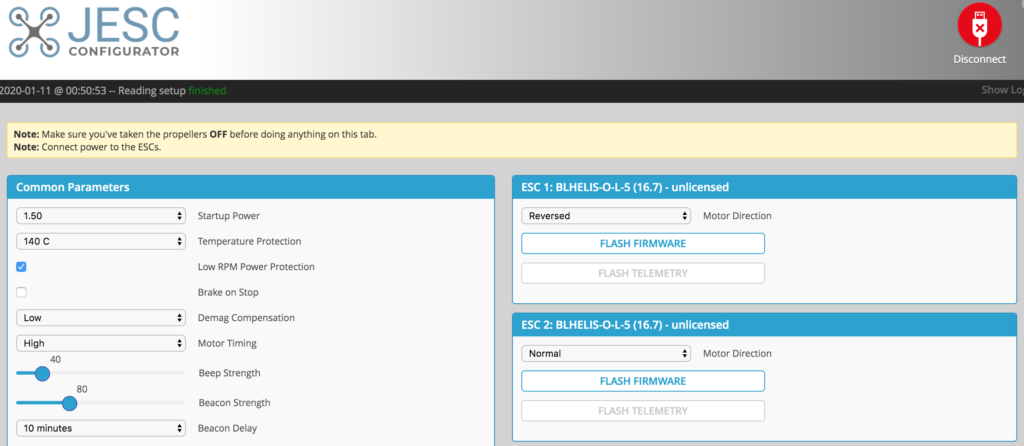
おっと、Lですね。一応、フラッシュまでしたんですが、ここからライセンスを認証できず。
一旦はここまでにしたいと思います。あ〜、Hだったらなぁw
でも、こんな事もあろうかと準備済み。FC入れ替えましたので続行します。
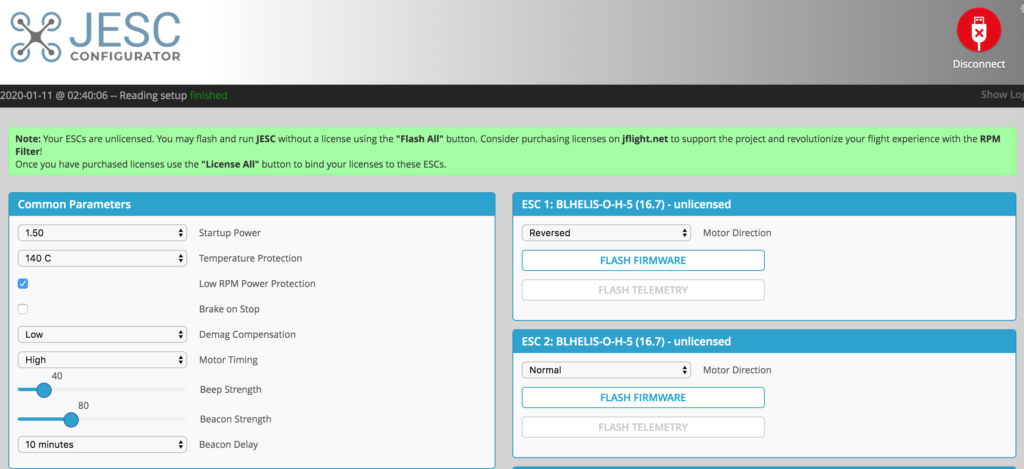
見事にHになりました。それではアカウントを作成します。
[sanko href="https://jflight.net/" title="flight.net" site="JESC"]
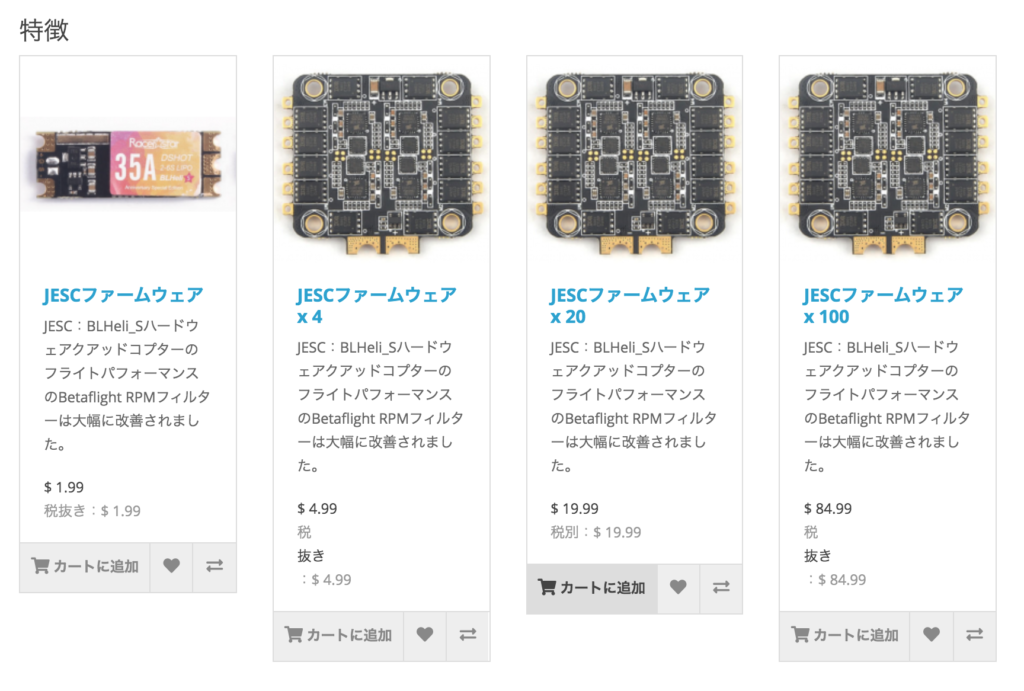
作成が終わったら購入になりますが、必要な分のみ購入としましょう。私は他の機体にも導入していますので、x 20で購入してあります。
初めての方はPaypalなどで支払いをしましょう。クレカはやめた方が良いです。
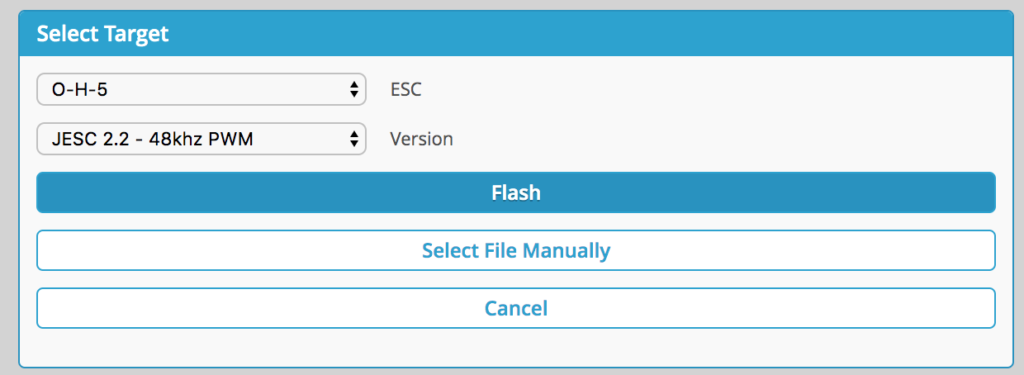
JESC Configuratorに戻ってFlash Allから今回は2.2の48khz PWM(RPMフィルター対応)を導入します。先にも記載しましたがPWMのみであれば無料版でOKです。
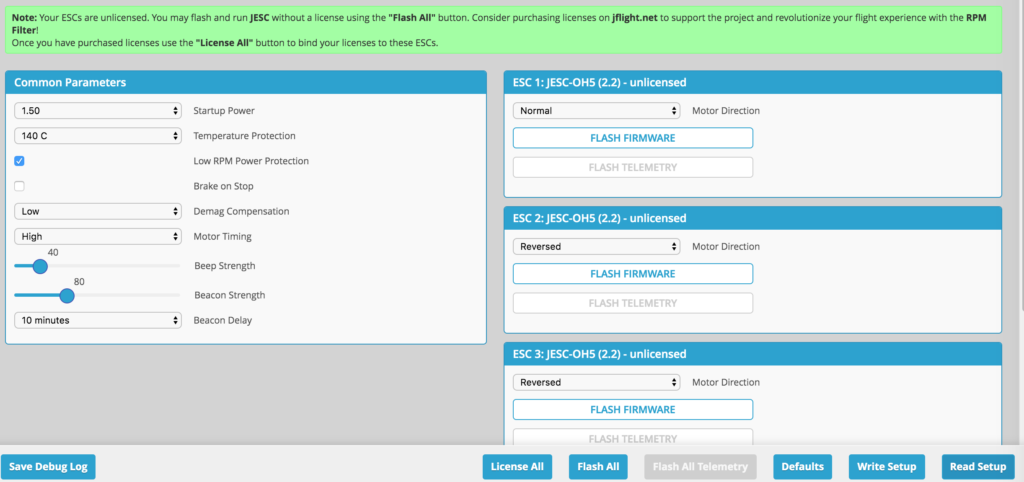
導入が終わると画面の様に「JESC-OH5 (2.2) - unlicensed」となります。
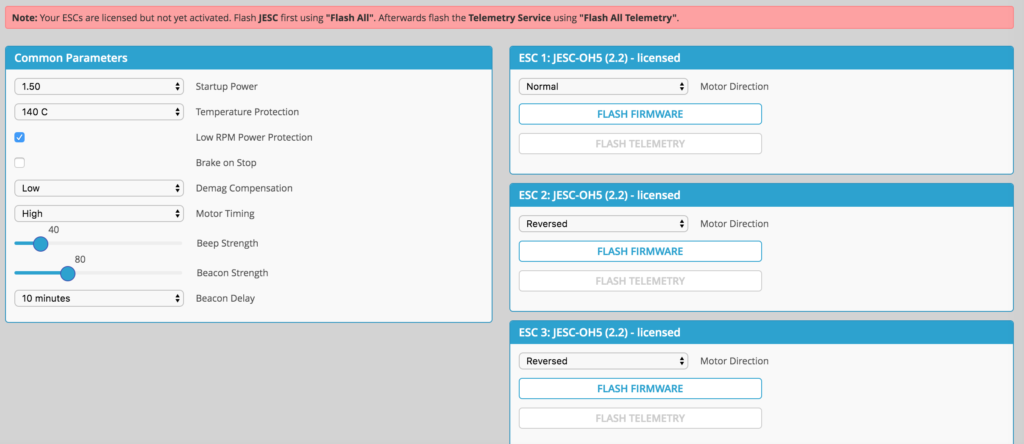
Flash allをしてくれと記載が出ますので、指示通りに対応します。
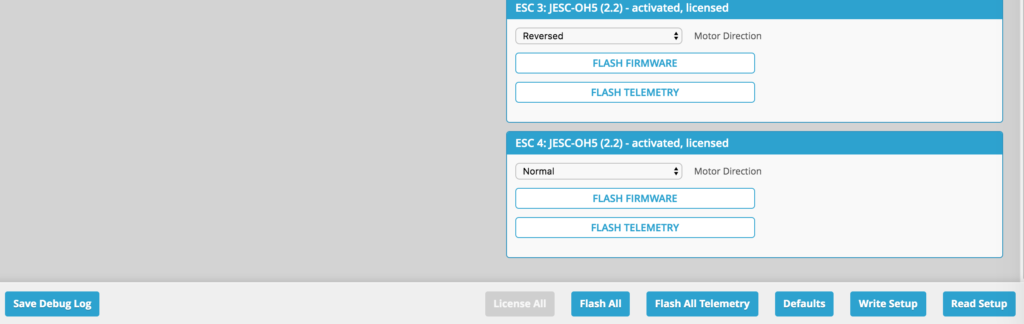
その後に「Flash all Telemetry」をします。
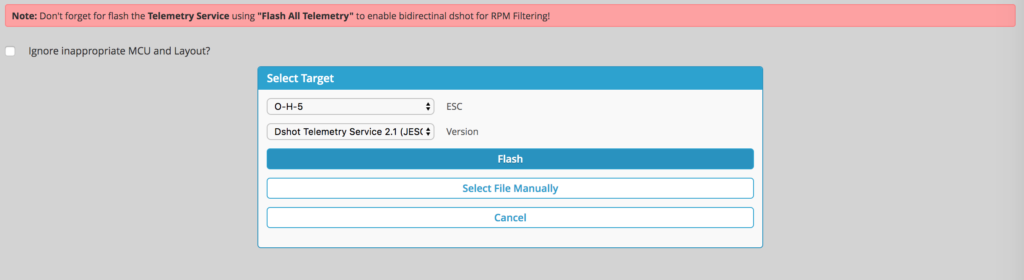
上記の様にしてFlash。
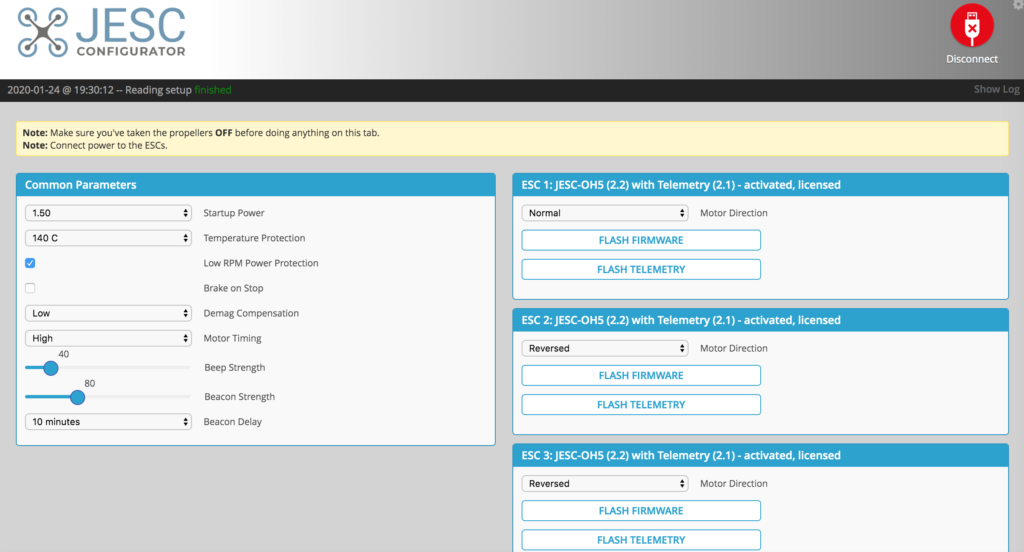
すると上部の注意が消えます。これでフィルターの導入は完了です。
EmuFlight configurator 設定
EmuFlight configuratorに戻り設定して行きます。
たいぴょんさんから教えて貰いながらですが、取り敢えずはCILでBateFlightの設定をそのままセットしました。エミュブースト1000、リミット200でバキバキって事なのでそのままセットしてます。
具体的にはBetaFlightのDump allをEmuFlightのCILへ貼り付けます。
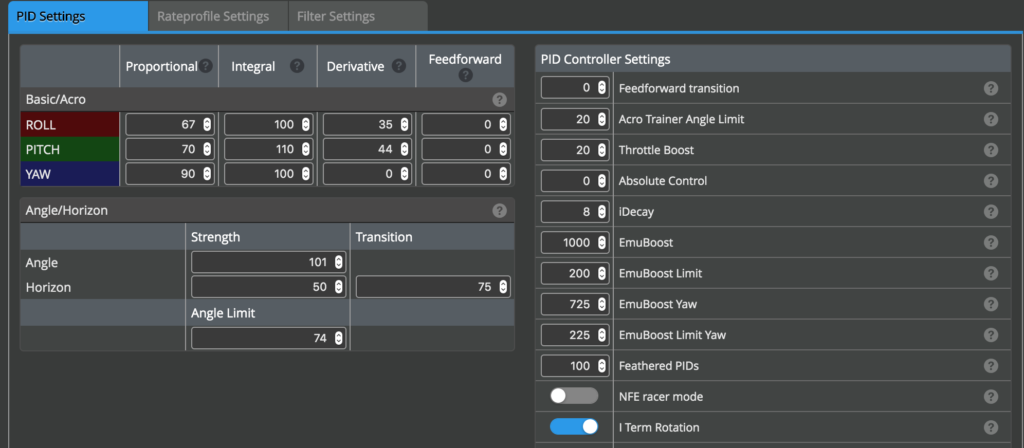
その後にPIDタブでEmuBootst=1000、EmuBoost Limit=200に設定しました。何故、この値が良いのかは現時点では解りません。
テストフライト動画

早速ですがテストフライトをして見ましたので公開しておきます。
明らかにスムース、そしてフライト可能な時間は30-40sec程度増えました。モーター音もとても綺麗です。操作はとても優しく屋外でのフライトに適していると思います。
ストレスフリーです。
まとめ
ちなみに質問を頂いたりしますが、詳しい事は全く解りません。流行りにのって試しただけですが、個人的にはBetalfiht4.1.1でフィルターを導入した方が良い気がします。
今回はMeteor65での実験でしたが、Mobula6で実装するとそれも素晴らしいという事です。
今回のEmuFlight実装には以下の方々の情報を元にしました。有難うございました。
- じぞまえさんのブログ記事
- たいぴょんさんへの問い合わせ
- Joshua Bardwell氏のYouTube動画