
最近、何度か記事にアップしていますが「BETAFPV|Beta95X V2」をフライトして来ました。
ドローンの詳細は別途、動画にしたいと思いますが、前回の記事でも記載した通りで組み立てはかなり面倒で二度と作りたく無いレベルですが、フライトした感想としてはこれは凄く良いんじゃ無いかと感じました。
私のBeta95X V2は、自作ドローンなのでモーターが「1204 5000kv」で、スロットルを入れてからオフにした時もスッとドローンが宙に浮くのでやっぱり1105辺りのモーターよりも良かったです。
ちょっと燃費悪いけどw
BETAFPV Beta95X V2のフライト動画
Beta95X V2 Whoop Quadcopter|BETAFPV
BETAFPV Beta95X V2をフライトしてみた感想(メリット)
上手く伝わるか解りませんが、既製品のフープタイプドローンでどれを購入するのかを悩んでいるのであれば十分に候補に入るかと思います。
また、95mmサイズのドローンはあまり無いので、 自作以外で剥きプロやInsta360Goを搭載するのであればBBeta95X V2一択でも良いと感じています。
V1と何が違うんだって感じなんですが、個人的にはバッテリーが上に積めるのはかなり大きく、フライトしている感覚が少し違って、バッテリーもズレたりしないので非常に飛ばし易いです。
ポイント
感じ方は人それぞれで、私の考える天地逆のメリットは
- バッテリーが上積みなので、フライトしている感覚が違う(私は好き)
- 機体下にバッテリーが無いので、着陸がし易い(場所選ばず)
- 上下にドローンの幅が広がらないので、風の抵抗が少ないと思ってる
1204 5000kvを利用してますがスロットルを入れた時にドローンが素直に反応してくれてるので、私の様に野良で場所を選ばすにフライトしたい方には超オススメです。
久々のダクト付きですが、やっぱり安心感が違いました。
これだけ良く飛んで撮影も出来るのであれば、旅行とかで利用するドローンは当面Beta95X V2を利用して行こうかなと考えてます。
ちなみに1204 5000kvモーターを購入するのであれば、個人的にはHappyModelの方が断然安いのでそちらをチョイスした方が良いかと思います。
Happymodel EX1204 1204 5000KV Brushless Motors
BETAFPV Beta95X V2のデメリット
ここ数日で6回フライトしてみて感じたデメリットをお伝えしておきます。
尚、1204 5000kvモーターでのお話なので、ストック品とは内容が異なるかと思います。
- プロップウォッシュは多少出る
- 1204 5000kvでもモーターが熱くなる
- 燃費が良いとは言えない
- メンテナンス性はフープとしては最悪
この辺りがデメリットだと思いますが、設定も煮詰めている途中なので、何度かフライトしているうちに印象が変わるかも知れません。
自作したBETAFPV Beta95X V2のコンセプト
皆さん何処にポイントを置くかと言う事になるかと思いますが、私の自作したBETAFPV Beta95X V2のポイントは以下となっています。
- カメラのアスペクト比4:3として、GoProの録画比率に合わせている
- モーターは1204 5000kvとして、自由なフライトが可能な様にしている
- レシーバーはR2000SBMを取り付けて、ある程度のロングフライトを可能にしている
撮影機としてながらも多少なりとも自由にフライトしたい。
落としたらアウトな場所でもフライトするのでXM Plusのレンジだと心許ない。絶対にRx Loss出来ないので、比較的に範囲の広いレシーバーをチョイス。
これがコンセプトです。
ちなみに、一回、何処飛んでるか解らなくなりそうになったので、GPS付けようかと思ってます。(今回の動画じゃ無いです。)
Beta95X V2のBetaFlight設定の注意点
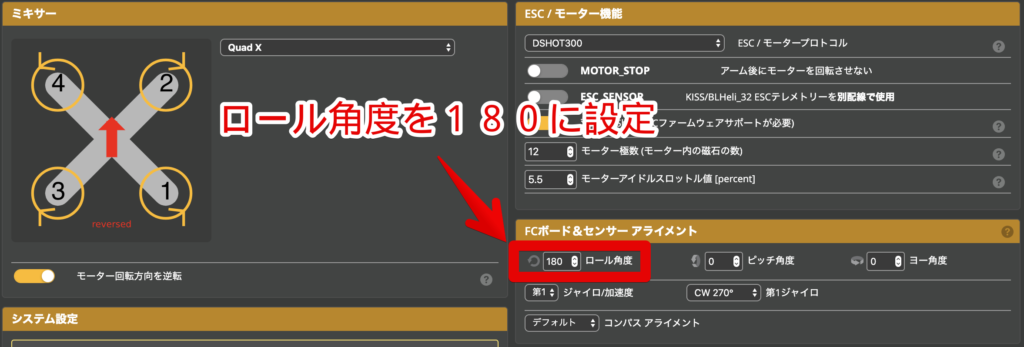
Beta95X V2はFCを反転させるので、ロール角度の変更が必要です。
いつもは0度で設定している箇所を180度で設定して下さい。
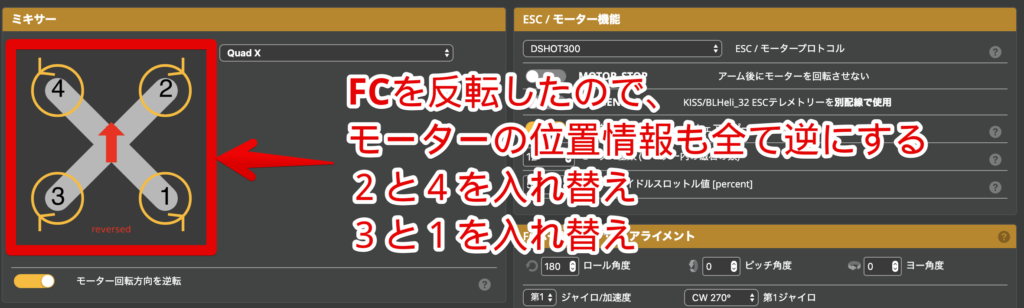
続いてモーターマッピングです。
FCを反転したので、モーターのマッピングの情報が逆になっています。
そこでマッピングを変更しましょう。
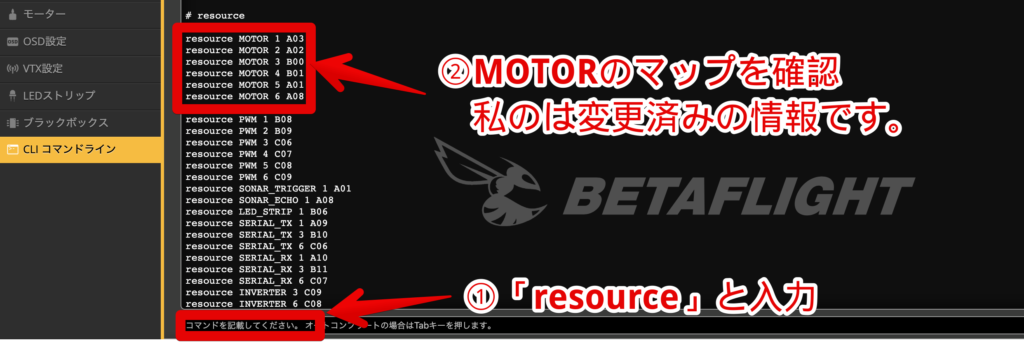
BetaFlightのCLIタブから「resource」と入力しますが、BetaFlightのバージョンによってはコマンドが異なる場合がありますので、その際には「Dump all」と入力して確認して下さい。
私の「resource」は既に変更済みですが、変更前だったとして変更方法を記載します。
FCにより情報が異なるケースもありますので、必ず皆さんが利用するFCのマッピングを確認して下さい。
- resource MOTOR 1 A03
- resource MOTOR 2 A02
- resource MOTOR 3 B00
- resource MOTOR 4 B01
この情報を先に書いた様にマッピングを変更します。つまり以下の様にします。
- resource MOTOR 1 B00
- resource MOTOR 2 B01
- resource MOTOR 3 A03
- resource MOTOR 4 A02
2と4を入れ替え、1と3を入れ替え。この情報をCLIに入力してsaveを入力します。
resource MOTOR 1 B00
resource MOTOR 2 B01
resource MOTOR 3 A03
resource MOTOR 4 A02
save
とこんな感じです。
この後にモーターの回転方法を確認して必要に応じてBl_Heliなどで変更しましょう。
あ、絶対にプロペラは外して下さい。直近で私を含めて3名くらい怪我してますので。
まとめ
色々と書きましたが、結果としては2機目を自作する為に本日パーツを追加注文しました。
私にはあまり無い出来事なので、BETA85XHD以来って感じです!